The 8086 Processor
A Brief History
The Intel 8086, released in 1978, marked a pivotal moment in computing history as Intel’s first 16-bit microprocessor. Designed by a team led by Stephen Morse, the 8086 was Intel’s answer to the growing demand for more powerful processors that could handle larger programs and address more memory than the existing 8-bit chips of the era.
The processor introduced the x86 architecture that would become the foundation for decades of computing evolution. With its 16-bit registers and 20-bit address bus 1, the 8086 could access up to 1 megabyte of memory—a massive improvement over the 64KB limitation of 8-bit processors. However, it retained backward compatibility concepts that would prove both beneficial and constraining for future generations.
Why 20-bit Address Bus in the 8086?
The 8086 used a 20-bit address bus, which was a deliberate design decision based on several factors:
Memory Capacity: With 20 address lines, the processor could address 2^20 = 1,048,576 locations, or exactly 1 megabyte of memory. In 1978, this was considered enormous - most computers had only 4KB to 64KB of memory.
Economic Considerations: Adding more address lines would have increased the chip’s pin count, making it more expensive to manufacture and requiring more expensive motherboards. Intel balanced capability with cost-effectiveness.
The Segmented Memory Model
Intel’s previous 8-bit processors contained 8-bit wide registers and 16-bit wide address bus, which can enable addressing of 2^16 = 64KB of memory. So thoeretically a program could use 64KB of memory.
Intel’s main goal was to maintain programming familiarity while expanding addressable memory. They wanted programmers to continue thinking in terms of 16-bit addresses (which they were already comfortable with from 8-bit processors) while secretly accessing a larger memory space. The segmentation model essentially says: “You can still write programs using 16-bit addresses, but we’ll automatically map these into different 64KB ‘segments’ of the larger 1MB space.”
The physical address was divided into 2 parts: selector/segment and offset.
- Selector (Segment): 16-bit value stored in one of CS, DS, ES, SS, etc.
- Offset: 16-bit value (e.g., in SI, DI, BP, SP, or an immediate/displacement).
- Physical Address Calculation: physical_address = (selector × 16) + offset
The idea is to express a 20-bit address using 2 16-bit registers. A selector register (CS, DS, ES, SS) indicates the starting address of the segment and the offset register (SI, DI, BP, SP) indicates the boundary of the segment. Since the offset is 16-bits, the boundary can be at a maximum of 64KB thus maintaining backward compatibility.
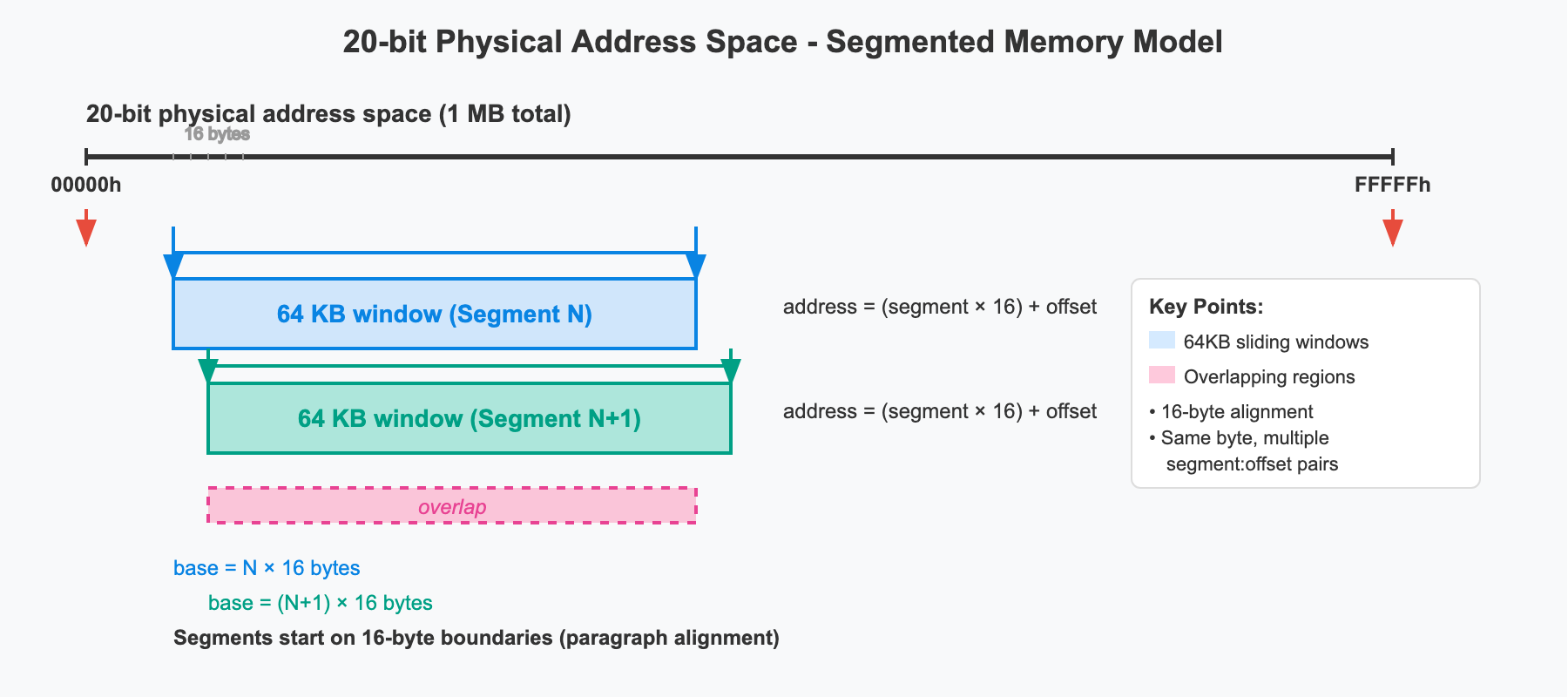
What the diagram shows
A segment is not a fixed block—it’s a sliding 64 KB window that can start on any 16-byte paragraph.
Segment value = paragraph number; multiplying by 16 shifts the window left or right in 16-byte steps.Segment N and Segment N+1 start only 16 bytes apart, so their two 64 KB windows overlap almost completely.
Any physical byte inside that overlap can be reached with two (or many more) different segment:offset pairs.Because the window can slide to 65,536 different paragraph positions (0000h–FFFFh), the segment register must be 16 bits wide—not just 4 bits.
The offset (0–65535) always selects the byte inside the current 64 KB window.
Together, segment and offset build the 20-bit physical address:
Disadvantages of the Segmentation Model
64 KB Segment Limit:
- Each selector covers only 64 KB (the 16-bit offset range). Although it was theoretically possible to support a higher offset which means larger segment memory for a program.
- Large programs or data structures must be split across multiple segments.
- Switching segments (e.g., changing CS or DS) adds overhead and complexity.
Alias Addresses:
- The same physical byte can be addressed by many segment:offset pairs.
- Example: physical 04808₁₆ = 047C:0048 = 047D:0038 = 047E:0028 = 047B:0058
- Makes comparing or normalizing pointers tricky.
Wrap Around after 20 bits:
- All segments after 0xF000 reference memory positions above the 1 MB address space that don’t exist, which the 8086 chose to wrap around by ignoring the 21st bit of an address. After all, there is no 21st line in the address bus.
The Real Mode
Real mode is the operating mode that all x86 processors boot into, providing direct hardware access and backward compatibility with the original 8086 processor. Named “real” because it provides direct, unsupervised access to real physical memory addresses without any protection mechanisms or virtual memory translation.
When an x86 processor powers on, it starts in real mode regardless of whether it’s a modern 64-bit CPU or the original 8086. This ensures that decades-old software can still run and that the boot process remains consistent across the entire x86 family.
Contents of 1MB memory layout in 8086 real mode
FFFFFh ┌─────────────────────────────────────────────────────────┐
│ System ROM BIOS (64KB) │
│ • Boot code and POST routines │
│ • Hardware initialization │
│ • Interrupt handlers (INT 10h, 13h, 16h, etc.) │
│ • System services and utilities │
F0000h ├─────────────────────────────────────────────────────────┤
│ Expansion ROM Area (192KB) │
│ • Network card ROM │
│ • SCSI controller ROM │
│ • Other adapter ROM │
│ • Often partially unused │
C0000h ├─────────────────────────────────────────────────────────┤
│ Video BIOS ROM (128KB) │
│ • VGA/EGA BIOS routines │
│ • Graphics mode setup │
│ • Character font data │
│ • Display adapter firmware │
A0000h ├─────────────────────────────────────────────────────────┤
│ Video RAM (128KB) │
│ A0000h-AFFFFh: EGA/VGA graphics memory (64KB) │
│ B0000h-B7FFFh: Monochrome text memory (32KB) │
│ B8000h-BFFFFh: Color text memory (32KB) │
90000h ├─────────────────────────────────────────────────────────┤
│ Extended Conventional Memory (576KB) │
│ • Available for programs if installed │
│ • Many early systems had less RAM │
│ • Could be used for disk buffers, RAM disks │
│ • Upper portion often used by DOS itself │
A0000h ├─────────────────────────────────────────────────────────┤ ← 640KB barrier
│ │
│ Conventional Memory (640KB) │
│ Main user program area │
│ │
│ ┌─────────────────────────────────────────────────────┐ │
│ │ User Program Area │ │
│ │ • Application programs │ │
│ │ • Program data and variables │ │
│ │ • Dynamic memory allocation │ │
│ │ • TSR (Terminate and Stay Resident) programs │ │
│ └─────────────────────────────────────────────────────┘ │
│ ┌─────────────────────────────────────────────────────┐ │
│ │ DOS Kernel and System Files │ │
│ │ • COMMAND.COM │ │
│ │ • Device drivers │ │
│ │ • File allocation tables │ │
│ │ • Directory buffers │ │
│ └─────────────────────────────────────────────────────┘ │
00500h ├─────────────────────────────────────────────────────────┤
│ BIOS Data Area (256 bytes) │
│ • Hardware configuration data │
│ • Equipment list │
│ • Keyboard buffer │
│ • Video mode information │
│ • Serial/parallel port addresses │
│ • Timer tick count │
│ • Memory size information │
003FFh ├─────────────────────────────────────────────────────────┤
│ Interrupt Vector Table (1024 bytes) │
│ • 256 interrupt vectors × 4 bytes each │
│ • Each vector: segment:offset (2 bytes:2 bytes) │
│ • INT 00h-FFh handler addresses │
│ • Hardware and software interrupts │
│ • Critical for system operation │
00000h └─────────────────────────────────────────────────────────┘
Key Memory Regions
- Interrupt Vector Table (00000h-003FFh)
- Size: 1024 bytes (256 vectors × 4 bytes each)
- Structure: Each entry contains segment:offset pointer (YYYY:XXXX format)
- Purpose: The system’s “phone book” for interrupt handlers
- Function: When hardware or software triggers an interrupt (like pressing a key), the CPU looks up the handler address here
- Critical vectors:
- INT 08h: System timer (18.2 times per second)
- INT 09h: Keyboard interrupt
- INT 10h: Video services
- INT 13h: Disk services
- INT 16h: Keyboard services
- INT 21h: DOS system calls
- Why it’s at address 0: The CPU automatically multiplies the interrupt number by 4 to find the handler address, so INT 09h handler is at 0×4×9 = 36 (0024h).
- BIOS Data Area (00400h-004FFh) - 256 bytes
- Purpose: System configuration and status information
- Hardware ports: COM1-4 2 and LPT1-3 3 base addresses
- Video info: Current video mode, screen dimensions, cursor position
- Keyboard: Shift/Ctrl/Alt key states 4, keyboard buffer 5
- System info: Installed memory size, equipment flags
- Timers: System tick count since boot
- Conventional Memory (00500h-9FFFFh) - ~640KB
- Purpose: Main workspace for operating system and applications
- DOS Kernel Area (lower portion)
- COMMAND.COM: The DOS command interpreter
- DOS kernel: File system, memory management, process control
- Device drivers: Disk drivers, printer drivers, etc.
- System buffers: File allocation table cache, directory buffers
- User Program Area (upper portion)
- Application programs: Your actual software
- Program data: Variables, arrays, user data
- Dynamic allocation: Heap memory for runtime allocation
- TSR programs: Background utilities (like antivirus, print spoolers)
- Why 640KB limit: IBM reserved the upper 384KB for hardware, creating the famous “640KB ought to be enough” barrier.
Video RAM (A0000h-BFFFFh) - 128KB
- Purpose: Direct access to display memory
- A0000h-AFFFFh: Graphics Memory (64KB)
- EGA/VGA framebuffer: Each byte represents pixel data
- Direct pixel control: Writing here immediately changes screen pixels
- Mode-dependent: Layout changes based on resolution and color depth
B0000h-B7FFFh: Monochrome Text (32KB)
- Character display: For monochrome monitors
- Text mode: 80×25 characters, 2 bytes per character (char + attribute)
B8000h-BFFFFh: Color Text (32KB)
- Color character display: Standard color text mode
- Format: Byte pairs (character, attribute)
- Example: Writing ‘A’ (65) + 0x07 (white on black) to B8000h displays ‘A’ at top-left
Video BIOS ROM (C0000h-C7FFFh) - 32KB
- Purpose: Graphics card firmware and services
- Font data: Character sets for text modes
- Hardware control: Register programming for graphics chips
- BIOS extensions: Additional video services beyond basic BIOS
- Memory-mapped: This is ROM on the graphics card, not system RAM.
Expansion ROM Area (C8000h-EFFFFh) - 160KB
- Purpose: Additional adapter card firmware
- Network cards: Boot ROM for network booting
- SCSI controllers: Disk controller firmware
- Sound cards: Audio processing firmware
- Other adapters: Any card that needs ROM space
- Often unused: Many systems had empty areas here.
System ROM BIOS (F0000h-FFFFFh) - 64KB
- Purpose: Core system firmware
- Power-On Self Test (POST): Hardware diagnostics at boot
- Bootstrap loader: Loads operating system from disk
- Hardware drivers: Low-level hardware access routines
- System services: INT 10h (video), INT 13h (disk), INT 16h (keyboard)
- Reset vector: CPU starts execution at FFFF:0000 on power-up
Why This Layout?
- Hardware Requirements: Different devices need different address ranges
- ROM needs upper memory: BIOS must be at top (reset vector at FFFFFh)
- Video needs fast access: Memory-mapped for performance
- Programs need contiguous space: Large conventional memory block
The 80286 and protected mode
Introduction to the 80286
The Intel 80286, released in 1982, represented a revolutionary leap in x86 architecture. While maintaining backward compatibility with the 8086, it introduced protected mode - a sophisticated operating environment that broke free from real mode’s limitations and laid the foundation for modern computing.
The 80286 was Intel’s answer to the growing demands for multitasking operating systems, memory protection, and the ability to address more than 1MB of memory. It powered the IBM PC/AT and became the processor that truly enabled the transition from simple DOS machines to powerful workstations.
Key Innovations of the 80286
16MB Address Space
- 24-bit address bus (compared to 8086’s 20-bit)
- 16MB maximum memory (2^24 = 16,777,216 bytes)
- Maintained real mode compatibility for existing
Hardware Memory Protection
- Privilege levels preventing user programs from corrupting system memory
- Segment-level protection with access rights and bounds checking
- Hardware-enforced security that software cannot bypass
Virtual Memory Foundation
- Segment descriptors containing detailed memory management information
- Global and Local Descriptor Tables for memory organization
- Task switching support enabling true multitasking
Addressing 24-Bit Memory
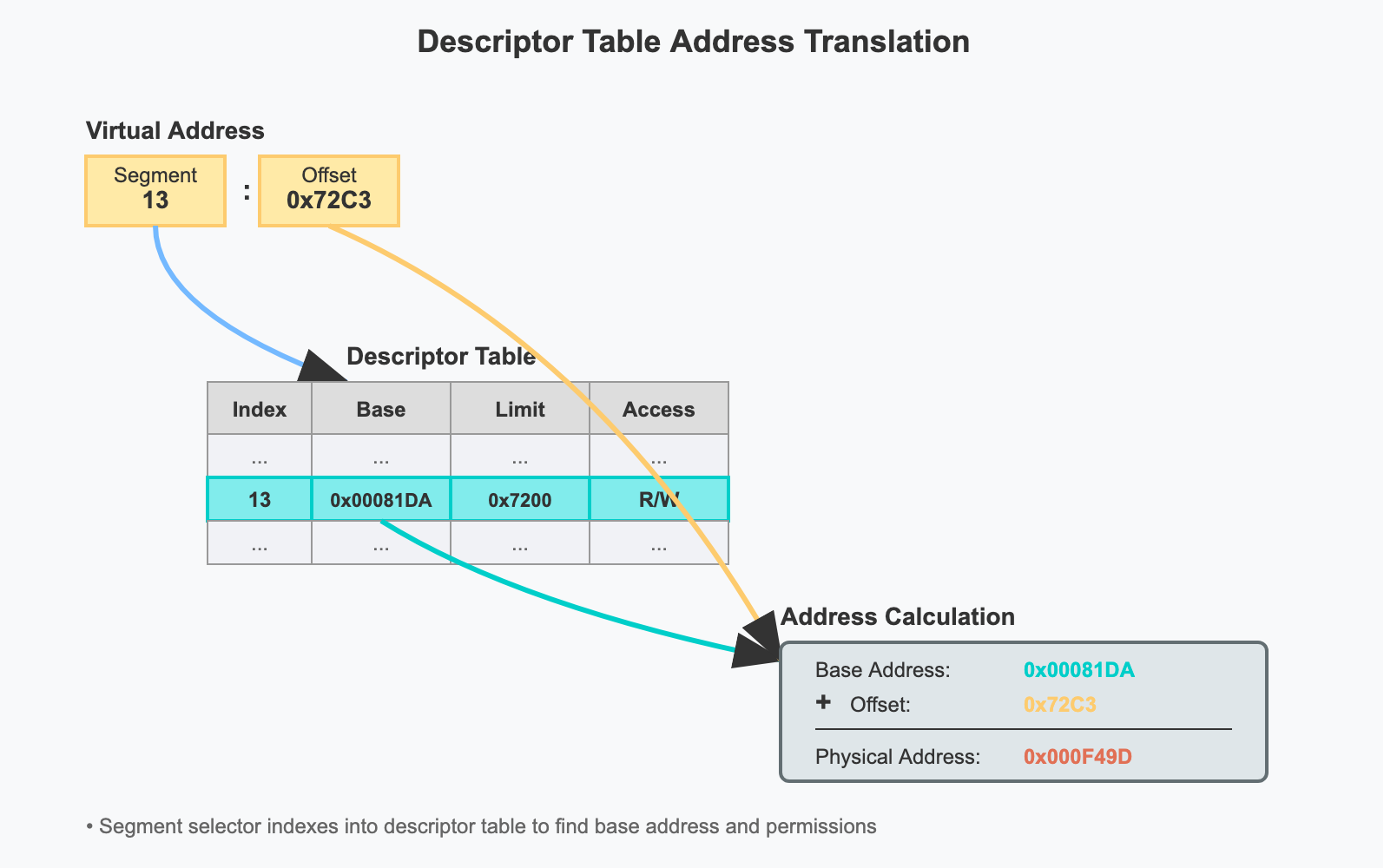
The 80286 processor had 24 address bus compared to 20-Bit address bus of 8086. It had to implement the addressing in such a way that its backward compatible with 8086 processor’s addressing. Instead of extending the logic used in 8086’s real mode addressing, 80286 took an entirely different approach. The memory was still addressed with selector (16-Bit): offset (16-Bit) pairs. In real mode, a selector value was a paragraph number of physical memory. In protected mode, a selector value is an index into a descriptor table. In both modes, programs are divided into segments. In real mode, these segments are at fixed positions in physical memory and the selector value denotes the paragraph number of the beginning of the segment.
While we are storing the actual physical address of the segment in descriptor table, the descriptor table entry can store other information related to the segment as well. For eg: length of the segment which can be used to check if the memory accessed by the program is within the segment, read/write flags which can be used to enforce protection, etc.
The Virtual Memory
The idea of virtual memory is provide an illusion to a program that it is the only program running and it has access to all the memory. The 80286 introduced the foundational concepts of virtual memory to the x86 architecture, though it implemented a more limited form compared to modern processors. Understanding the 80286’s approach helps clarify why virtual memory became essential and how it evolved.
Virtual memory creates an abstraction layer between what programs think they’re accessing (virtual addresses) and what actually exists in physical memory. The 80286 achieved this through segmentation-based virtual memory.
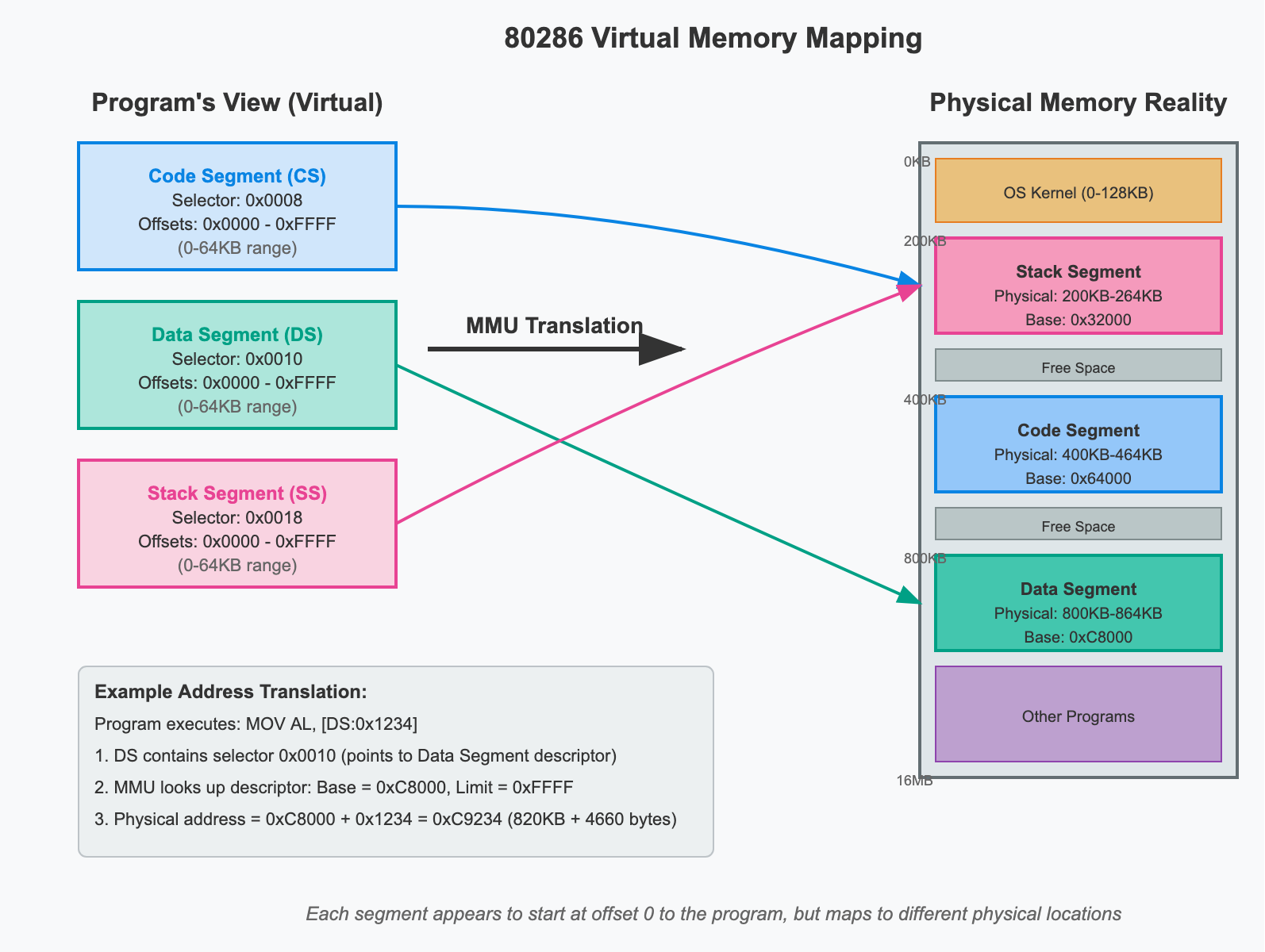
Simplified Programming Model with Virtual Memory
Before virtual memory, programmer had to directly manage physical addresses which is error prone and there’s a possibility of overwriting other program’s data. This also means the programmer has to know where the segments will be loaded in memory beforehand. Virtual Memory solves this issue as each segment will be under the illusion that it starts at memory address 0 and can access upto 64KB of memory.
Global and Local Descriptor Tables (GDT and LDT)
What Are Descriptor Tables?
Think of descriptor tables as address books for the computer’s memory system. Just like you use a phone book to look up someone’s address when you only know their name, the 80286 processor uses descriptor tables to look up memory information when it only knows a selector (a kind of memory “name”).
The Basic Problem They Solve
In real mode, programs had to deal with physical memory addresses directly:
Real Mode Problem:
Program says: "I want to access memory at 0x12345"
CPU responds: "OK, accessing physical memory at 0x12345"
Issues:
- Programs must know exact physical addresses
- No protection between programs
- Programs can corrupt each other's memory
- Hard to relocate programs in memory
Protected mode solves this with an indirection layer:
Protected Mode Solution:
Program says: "I want to access selector 0x0008, offset 0x1234"
CPU responds: "Let me look up selector 0x0008 in the descriptor table..."
CPU finds: "Selector 0x0008 points to base address 0x100000"
CPU calculates: "Physical address = 0x100000 + 0x1234 = 0x101234"
CPU verifies: "Access allowed? Yes. Accessing physical memory at 0x101234"
Understanding Selectors
A selector is a 16-bit value that acts like a “memory ID card.” Instead of using physical addresses, programs use selectors to identify memory segments.
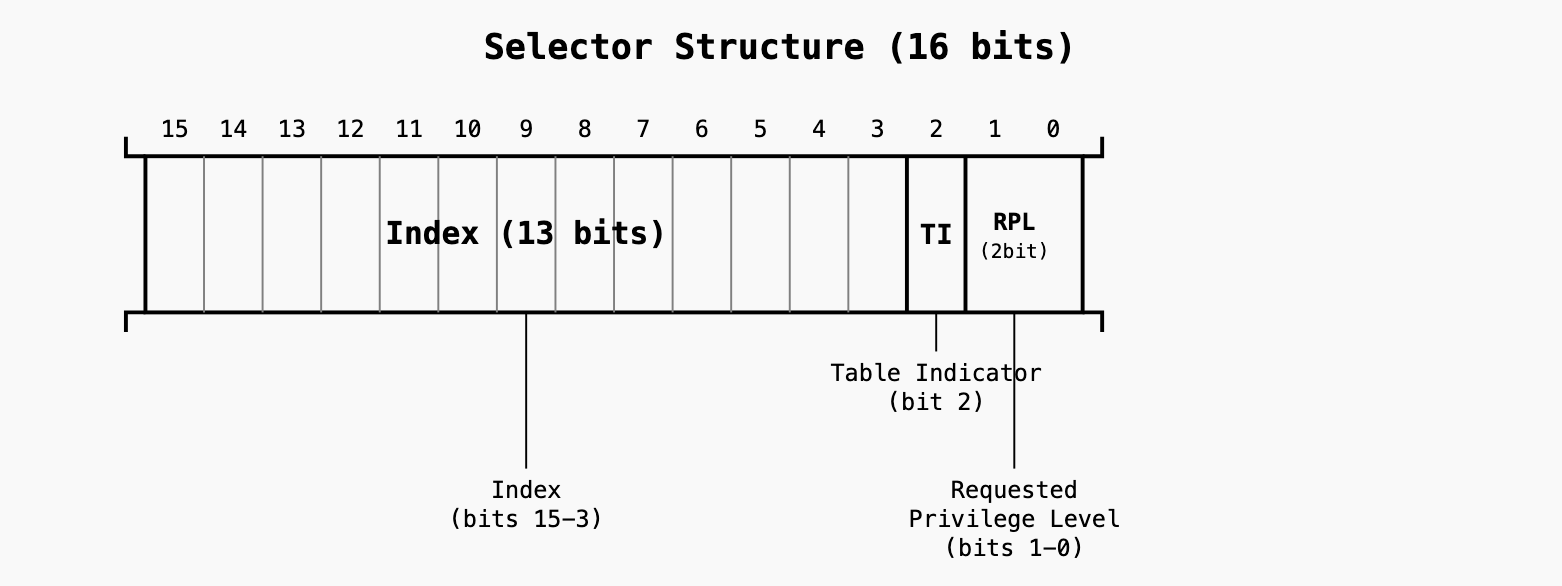
- Index (bits 15-3): Which entry in the descriptor table (0-8191)
- TI (bit 2): Table Indicator - 0 = GDT, 1 = LDT
- RPL (bits 1-0): Requested Privilege Level (0-3)
What Is a Descriptor?
A descriptor is an 8-byte data structure that contains all the information the CPU needs to access a memory segment safely.
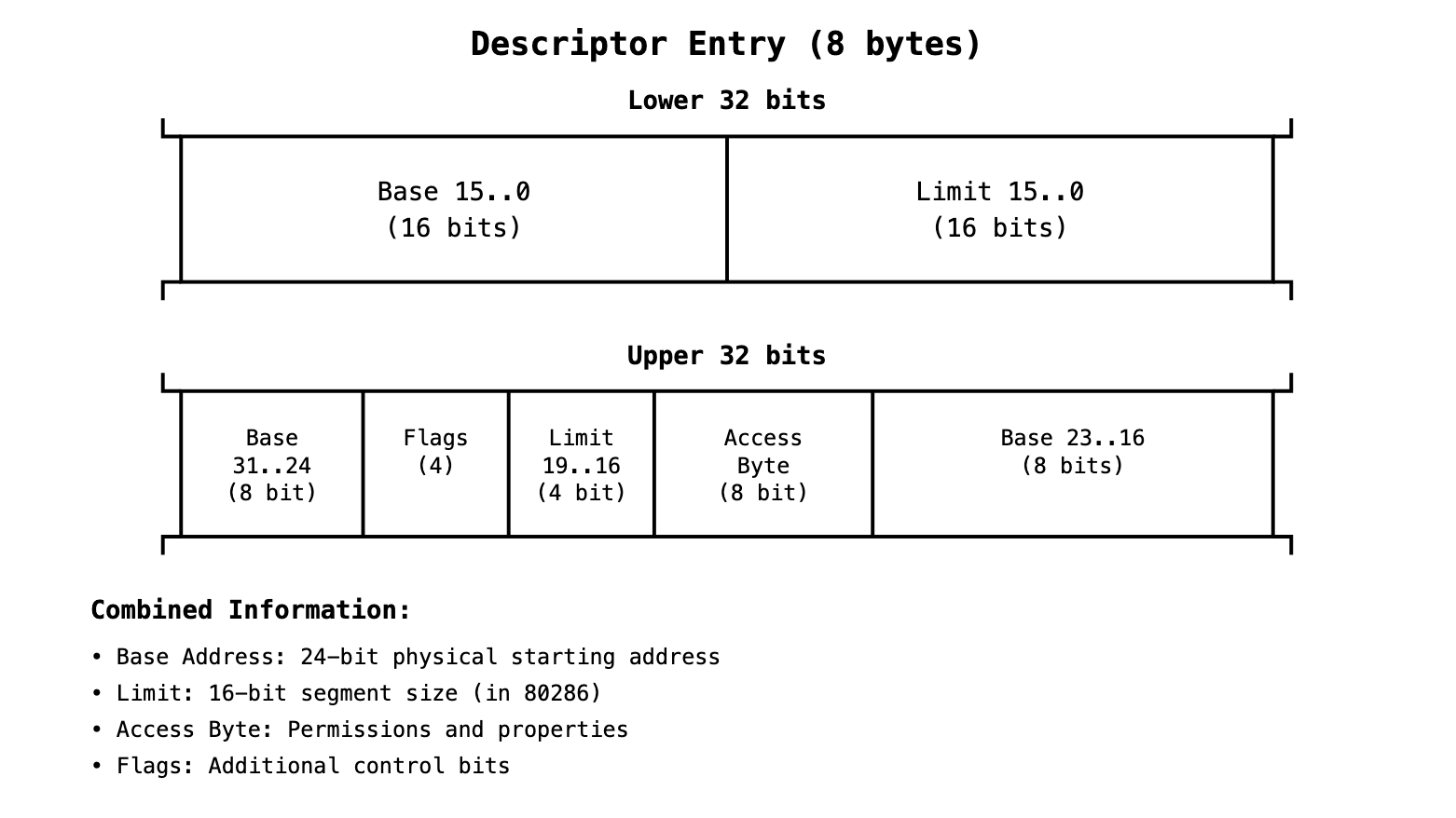
Base Address (24 bits total in 80286): (Base[23..16] + Base[15..0])
- Bits 15..0 from the lower section
- Bits 23..16 from the upper section
Limit (20 bits total, but 80286 only uses 16 bits):
- Limit 15..0 (16 bits) - from Lower 32 bits
- Limit 19..16 (4 bits) - from Upper 32 bits (but not used in 80286)
The descriptor format was designed to be forward-compatible. The 80386 later extended it to use:
- Full 32-bit base address (adding Base 31..24)
- Full 20-bit limit (adding Limit 19..16 with granularity bit)
Final physical address calculation:
Physical Address = 24-bit Base (from descriptor) + 16-bit Offset (from instruction)
Access Byte Format
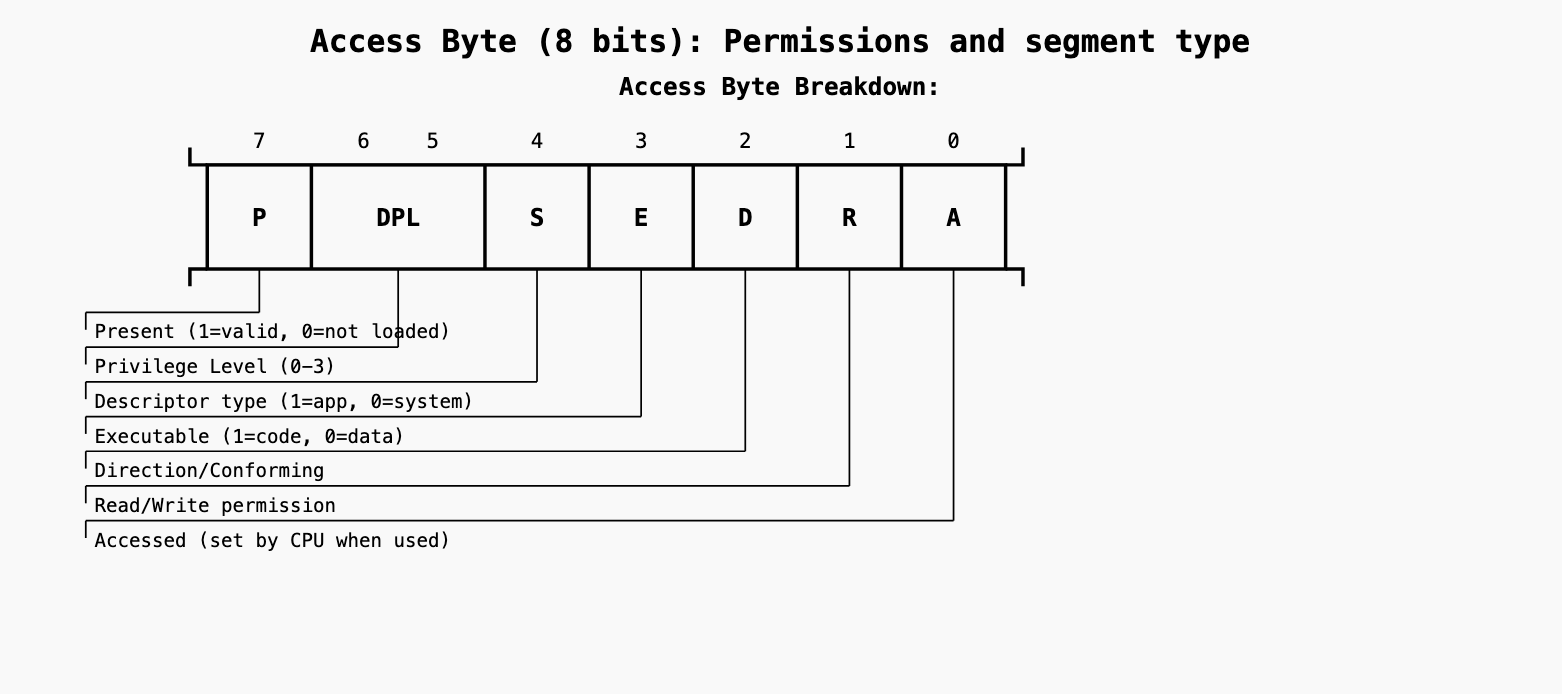
- P (Present) - Bit 7: Indicates whether the segment is currently loaded in memory. When P=1, the segment is valid and can be accessed. When P=0, any attempt to access this segment generates a segment-not-present exception, allowing the OS to load the segment from disk (virtual memory support).
- DPL (Descriptor Privilege Level) - Bits 6-5: Defines the privilege level required to access this segment (0-3, where 0 is most privileged). Code running at privilege level 3 (user mode) cannot access segments with DPL=0 (kernel mode). This enforces memory protection between kernel and user space.
- S (System) - Bit 4: Distinguishes between application segments and system segments. When S=1, this is an application segment (code/data used by programs). When S=0, this is a system segment (like Task State Segment or LDT descriptor) used by the processor for special operations.
- E (Executable) - Bit 3: Determines if this segment contains executable code or data. When E=1, this is a code segment that can be executed (instructions fetched from here). When E=0, this is a data segment used for storing variables and cannot be executed.
- D (Direction/Conforming) - Bit 2: For data segments: D=0 means segment grows upward (normal), D=1 means grows downward (stack). For code segments: D=0 means non-conforming (strict privilege checking), D=1 means conforming (can be called from lower privilege levels without changing CPL).
- R (Read/Write) - Bit 1: For data segments: R=1 allows write access, R=0 makes it read-only. For code segments: R=1 allows reading the code (useful for debuggers), R=0 makes it execute-only. Code segments are never writable regardless of this bit.
- A (Accessed) - Bit 0: Automatically set by the CPU whenever the segment is accessed (loaded into a segment register or used). Never cleared by hardware - only software can clear it. Used by operating systems to implement virtual memory algorithms by tracking which segments are actively being used.
Flags Field (4 bits)
Bit 3: G (Granularity)
G = 0: Limit is in bytes (fine granularity)
- Segment can be 1 byte to 1 MB in size
- Limit value is used directly
G = 1: Limit is in 4KB pages (page granularity)
- Segment can be 4KB to 4GB in size
- CPU automatically shifts limit left by 12 bits (multiplies by 4096)
Bit 2: D/B (Default/Big)
For Code Segments: Controls default operand/address size
- D = 0: 16-bit mode (8086/80286 compatible)
- D = 1: 32-bit mode (80386+ native)
For Data Segments: Controls stack pointer size
- B = 0: Stack uses SP (16-bit stack pointer)
- B = 1: Stack uses ESP (32-bit stack pointer)
Bit 1: L (Long Mode)
- For 64-bit mode only (not relevant for 80286)
- L = 0: Not a 64-bit code segment
- L = 1: 64-bit code segment (x86-64 mode)
- Rule: If L = 1, then D must = 0
Bit 0: AVL (Available)
- Available for system software use
- Not used by CPU hardware
- OS can use for its own purposes
- Examples: Process tracking, debugging flags, memory management hints
Global Descriptor Table (GDT)
The Global Descriptor Table is a system-wide table containing descriptors that all tasks can potentially access. Think of it as the “public directory” of memory segments.
GDT Structure and Location
Physical Memory Layout:
┌─────────────────────────────────────────────────────────────┐
│ System RAM │
│ │
│ ┌─────────────────────────────────────────────────────┐ │
│ │ GDT │ │
│ ├─────────────────────────────────────────────────────┤ │
│ │ Entry 0: NULL Descriptor (required) │ │
│ ├─────────────────────────────────────────────────────┤ │
│ │ Entry 1: Kernel Code Segment │ │
│ ├─────────────────────────────────────────────────────┤ │
│ │ Entry 2: Kernel Data Segment │ │
│ ├─────────────────────────────────────────────────────┤ │
│ │ Entry 3: User Code Segment │ │
│ ├─────────────────────────────────────────────────────┤ │
│ │ Entry 4: User Data Segment │ │
│ ├─────────────────────────────────────────────────────┤ │
│ │ Entry 5: Task A's LDT Descriptor │ │
│ ├─────────────────────────────────────────────────────┤ │
│ │ Entry 6: Task A's TSS Descriptor │ │
│ ├─────────────────────────────────────────────────────┤ │
│ │ Entry 7: Task B's LDT Descriptor │ │
│ ├─────────────────────────────────────────────────────┤ │
│ │ Entry 8: Task B's TSS Descriptor │ │
│ └─────────────────────────────────────────────────────┘ │
│ │
└─────────────────────────────────────────────────────────────┘
GDTR Register (inside CPU):
┌─────────────────────────────────────────────────────────────┐
│ Base Address: Points to start of GDT in memory │
│ Limit: Size of GDT - 1 │
└─────────────────────────────────────────────────────────────┘
What Goes in the GDT?
System-wide resources that multiple tasks might need:
1. Operating System Segments
- Kernel code segment (Ring 0)
- Kernel data segment (Ring 0)
- System service segments
2. Common User Segments
- Standard user code segment (Ring 3)
- Standard user data segment (Ring 3)
3. Task Management Descriptors
- Task State Segments (TSS) for each task
- Local Descriptor Table (LDT) descriptors for each task
4. Device Driver Segments
- Driver code segments
- Shared system libraries
Example GDT Layout
┌─────┬───────────────────┬──────────┬─────────┬─────────────────┐
│Index│ Description │ Base │ Limit │ Access Rights │
├─────┼───────────────────┼──────────┼─────────┼─────────────────┤
│ 0 │ NULL (required) │ 00000000 │ 00000 │ 00000000 │
├─────┼───────────────────┼──────────┼─────────┼─────────────────┤
│ 1 │ Kernel Code │ 00000000 │ FFFFF │ 9A (Ring 0, X/R)│
├─────┼───────────────────┼──────────┼─────────┼─────────────────┤
│ 2 │ Kernel Data │ 00000000 │ FFFFF │ 92 (Ring 0, R/W)│
├─────┼───────────────────┼──────────┼─────────┼─────────────────┤
│ 3 │ User Code │ 00000000 │ FFFFF │ FA (Ring 3, X/R)│
├─────┼───────────────────┼──────────┼─────────┼─────────────────┤
│ 4 │ User Data │ 00000000 │ FFFFF │ F2 (Ring 3, R/W)│
├─────┼───────────────────┼──────────┼─────────┼─────────────────┤
│ 5 │ Text Editor LDT │ 00200000 │ 01000 │ 82 (LDT, Ring 0)│
├─────┼───────────────────┼──────────┼─────────┼─────────────────┤
│ 6 │ Text Editor TSS │ 00201000 │ 00068 │ 89 (TSS, Ring 0)│
├─────┼───────────────────┼──────────┼─────────┼─────────────────┤
│ 7 │ Web Browser LDT │ 00300000 │ 01000 │ 82 (LDT, Ring 0)│
├─────┼───────────────────┼──────────┼─────────┼─────────────────┤
│ 8 │ Web Browser TSS │ 00301000 │ 00068 │ 89 (TSS, Ring 0)│
└─────┴───────────────────┴──────────┴─────────┴─────────────────┘
Local Descriptor Table (LDT)
A Local Descriptor Table is a task-specific table containing descriptors that are private to one particular task. Think of it as each task’s “private address book.”
Key Differences: GDT vs LDT
GDT (Global - Shared): LDT (Local - Private):
┌─────────────────────┐ ┌─────────────────────┐
│ • One per system │ │ • One per task │
│ • Shared by all │ │ • Private to task │
│ • System resources │ │ • Task resources │
│ • Always available │ │ • Only when task │
│ │ │ is running │
└─────────────────────┘ └─────────────────────┘
How LDTs Work
Step 1: LDT Descriptor in GDT The GDT contains a descriptor that points to each task’s LDT:
GDT Entry 5 (Text Editor's LDT):
┌─────────────────────────────────────────────────────────────┐
│ Base: 0x200000 ← Physical address where LDT is stored │
│ Limit: 0x1000 ← LDT can hold up to 512 descriptors │
│ Type: LDT ← This is an LDT descriptor │
│ DPL: 0 ← Ring 0 (system manages LDTs) │
└─────────────────────────────────────────────────────────────┘
Step 2: LDT Contains Task’s Private Descriptors
At physical address 0x200000 (Text Editor's LDT):
┌─────────────────────────────────────────────────────────────┐
│ Entry 0: NULL │
│ Entry 1: Text Editor Code Segment │
│ Entry 2: Text Editor Data Segment │
│ Entry 3: Text Editor Stack Segment │
│ Entry 4: Document Buffer Segment │
│ Entry 5: Font Library Segment │
└─────────────────────────────────────────────────────────────┘
LDT Entries
LDT entries follow the exact same 8-byte descriptor format as GDT entries. An LDT is a block of (linear) memory up to 64K in size, just like the GDT. The difference from the GDT is in the Descriptors that it can store, and the method used to access it.
Both use the same:
- 64-bit (8-byte) descriptor structure
- Same Base/Limit/Access byte/Flags layout
- Same bit positions for all fields
However, there are content restrictions for LDT:
- LDT cannot hold system segments (Task State Segments and Local Descriptor Tables)
- LDT can only contain application segments (code/data) and some gates
- GDT can contain everything (application segments, system segments, LDT descriptors, TSS descriptors)
What Are Gates?
Gates are special descriptors that act as “doorways” for controlled transfers of execution. Unlike regular segment descriptors that point to memory regions, gates contain entry points (addresses) where execution should transfer to.
Types of Gates in x86:
1. Call Gates
- Purpose: Allow controlled calls from lower privilege code to higher privilege code
- Function: Like a “secure function pointer” - lets user code (Ring 3) safely call kernel functions (Ring 0)
- Contains: Target code segment selector + offset where to jump
- Security: CPU automatically checks privilege levels and switches stacks if needed
2. Task Gates
- Purpose: Trigger hardware task switches
- Function: Points to a TSS descriptor to switch to a different task
- Contains: TSS selector that identifies which task to switch to
- Usage: Can be placed in IDT for task-switching interrupts
3. Interrupt Gates
- Purpose: Handle interrupts and exceptions
- Function: Similar to call gates but for interrupt handling
- Contains: Target code segment + interrupt handler address
- Behavior: Automatically disables interrupts when called
4. Trap Gates
- Purpose: Handle exceptions and software interrupts
- Function: Like interrupt gates but doesn’t disable interrupts
- Contains: Target code segment + exception handler address
- Usage: For system calls and debugging exceptions
Why Gates Can Be in LDT:
While LDT cannot contain system segments (TSS, LDT descriptors), it can contain gates because:
- Call gates: Allow process-specific entry points to system services
- Task gates: Could theoretically allow process-specific task switching (though rarely used)
Example Use Case:
Process A's LDT might contain:
├── Code Segment (Ring 3)
├── Data Segment (Ring 3)
├── Call Gate → Kernel function for file I/O
└── Call Gate → Kernel function for memory allocation
This way, each process can have its own set of “approved” kernel entry points through call gates in their private LDT, while the kernel maintains control over exactly which functions can be called and how.
In practice: Modern operating systems rarely use LDTs or gates, preferring software-based system call mechanisms and paging-based memory protection. But the hardware still supports these features for compatibility and specialized use cases.
GDTR and LDTR
The processor locates the GDT and the current LDT in memory by means of the GDTR and LDTR registers. These registers store the base addresses of the tables in the linear address space and store the segment limits.
GDTR (Global Descriptor Table Register):
┌─────────────────────────────────────────────────────────────┐
│ GDTR - Simple pointer structure │
├─────────────────────────────────┬───────────────────────────┤
│ Base Address (32-bit) │ Limit (16-bit) │
│ Linear address of GDT in memory │ Size of GDT - 1 │
└─────────────────────────────────┴───────────────────────────┘
- Direct pointer to GDT location in memory
- Loaded with
LGDTinstruction - Contains actual memory address and size
LDTR (Local Descriptor Table Register):
┌─────────────────────────────────────────────────────────────┐
│ LDTR - Segment register with selector + cached descriptor │
├─────────────────────────────────────────────────────────────┤
│ Visible: LDT Selector (16-bit) │
├─────────────────────────────────────────────────────────────┤
│ Hidden: Cached LDT Descriptor (64-bit) │
│ Base + Limit + Access Rights from GDT entry │
└─────────────────────────────────────────────────────────────┘
- Indirect reference through GDT selector
- The LDT is defined as a ’normal’ memory Segment inside the GDT - simply with a Base memory address and Limit
- Loaded with LLDT instruction using a selector
- CPU automatically fetches LDT descriptor from GDT and caches it
The Relationship:
- GDTR points directly to GDT in memory
- LDTR contains a selector that points to an entry within the GDT
- That GDT entry describes where the LDT is located
- CPU caches that LDT descriptor information from GDT in LDTR’s hidden part
WHo can Read/Write into GDTR and LDTR registers?
GDTR (Global Descriptor Table Register):
- Set by: Operating system kernel (Ring 0 code only)
- Instructions: LGDT (Load GDT) and SGDT (Store GDT)
- Privilege: These instructions can only be executed in Ring 0 (kernel mode)
- When: During OS boot/initialization
LDTR (Local Descriptor Table Register):
- Set by: Operating system kernel (Ring 0 code only)
- Instructions: LLDT (Load LDT) and SLDT (Store LDT)
- Privilege: Ring 0 only
- When: During task/process creation or context switches
Initial Setup Process:
1. System Boot Sequence:
1. CPU starts in Real Mode (no GDTR/LDTR)
2. Bootloader loads OS kernel
3. Kernel creates initial GDT in memory
4. Kernel executes LGDT to set GDTR
5. Kernel switches to Protected Mode
6. Kernel can now create LDTs and set LDTR as needed
2. GDT Creation (by OS Kernel):
// Kernel code (Ring 0) during boot
struct gdt_entry gdt[8]; // Array in kernel memory
// Set up null descriptor (entry 0)
gdt[0] = {0};
// Set up kernel code segment (entry 1)
gdt[1] = {base: 0, limit: 0xFFFFF, access: 0x9A, flags: 0xC};
// Set up kernel data segment (entry 2)
gdt[2] = {base: 0, limit: 0xFFFFF, access: 0x92, flags: 0xC};
// Set up user code segment (entry 3)
gdt[3] = {base: 0, limit: 0xFFFFF, access: 0xFA, flags: 0xC};
// More entries...
// Load the GDT
struct gdt_ptr {
uint16_t limit;
uint32_t base;
} gdt_descriptor = {sizeof(gdt)-1, (uint32_t)gdt};
asm("lgdt %0" : : "m"(gdt_descriptor));
Who Can Read/Write GDT and LDT?
Reading:
GDT/LDT contents: Any code can read (they’re just memory) GDTR/LDTR values: SGDT/SLDT instructions (Ring 0 only)
Writing:
GDT/LDT contents: Only Ring 0 code should modify (by convention) GDTR/LDTR registers: Only Ring 0 via LGDT/LLDT
Memory Protection:
GDT location: Kernel typically places GDT in kernel-only memory pages LDT location: Can be in user-accessible memory (but user can’t change LDTR)
Post 80386 Era
- SGDT/SLDT: Ring 3 accessible (any privilege level)
- LGDT/LLDT: Still Ring 0 only
Why Intel Made This Change:
Practical Reasons:
- Debugging tools: Debuggers and system utilities needed to examine system state
- Virtual machines: VM software needed to read GDT/IDT information
- System monitoring: Performance tools and diagnostics required access
- Compatibility: Some software had legitimate needs to read (not write) this info
Security Analysis:
- Reading GDTR/IDTR: Reveals memory layout but doesn’t grant control
- Still protected: Only reading allowed - writing still requires Ring 0
- Limited exposure: Knowing GDT location doesn’t directly compromise security
Modern Usage:
This change enabled:
- Hypervisors: VMware, VirtualBox can inspect guest OS descriptor tables
- Security tools: Rootkit detectors can examine system structures
- Debuggers: WinDbg, GDB can show detailed system state
- OS utilities: System information tools can display memory management details
Task State Segment (TSS)
The Task State Segment (TSS) is a special data structure that contains the complete execution state of a task (program). Think of it as a “snapshot” that captures everything the CPU needs to know about a task - all its registers, memory settings, and execution context.
Before the 80286, task switching was a manual, error-prone process:
Manual Task Switching (8086 era):
┌─────────────────────────────────────────────────────────────┐
│ 1. Programmer saves all registers manually │
│ MOV [task_a_ax], AX │
│ MOV [task_a_bx], BX │
│ MOV [task_a_cx], CX │
│ ... (save 20+ registers and flags) │
│ │
│ 2. Programmer loads new task's registers manually │
│ MOV AX, [task_b_ax] │
│ MOV BX, [task_b_bx] │
│ ... (load 20+ registers and flags) │
│ │
│ 3. Programmer manages memory segments manually │
│ MOV DS, [task_b_ds] │
│ MOV ES, [task_b_es] │
│ │
│ Problems: │
│ ❌ 50+ instructions per task switch │
│ ❌ Easy to forget registers │
│ ❌ No atomic operation │
│ ❌ No protection │
│ ❌ Very slow │
└─────────────────────────────────────────────────────────────┘
TSS Solution:
Hardware Task Switching (80286):
┌─────────────────────────────────────────────────────────────┐
│ Single instruction: JMP task_selector │
│ │
│ Hardware automatically: │
│ ✅ Saves ALL current state to current TSS │
│ ✅ Loads ALL new state from target TSS │
│ ✅ Updates memory management (LDT switch) │
│ ✅ Atomic operation (cannot be interrupted) │
│ ✅ Hardware protection checks │
│ ✅ Extremely fast (few clock cycles) │
└─────────────────────────────────────────────────────────────┘
TSS Structure and Layout
The 80286 TSS is a 44-byte (104 bytes with I/O bitmap 6) data structure containing every piece of information needed to resume a task:
TSS Layout (80286):
┌─────────────────────────────────────────────────────────────┐
│ Offset │ Size │ Field Name │ Description │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 00h │ 2 │ Previous TSS Link │ Selector of previous │
│ │ │ │ task (for nested calls) │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 02h │ 2 │ SP0 (Stack Ring 0)│ Stack pointer for Ring 0│
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 04h │ 2 │ SS0 (Stack Ring 0)│ Stack segment for Ring 0│
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 06h │ 2 │ SP1 (Stack Ring 1)│ Stack pointer for Ring 1│
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 08h │ 2 │ SS1 (Stack Ring 1)│ Stack segment for Ring 1│
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 0Ah │ 2 │ SP2 (Stack Ring 2)│ Stack pointer for Ring 2│
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 0Ch │ 2 │ SS2 (Stack Ring 2)│ Stack segment for Ring 2│
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 0Eh │ 2 │ IP │ Instruction Pointer │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 10h │ 2 │ FLAGS │ Processor flags │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 12h │ 2 │ AX │ General register AX │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 14h │ 2 │ CX │ General register CX │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 16h │ 2 │ DX │ General register DX │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 18h │ 2 │ BX │ General register BX │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 1Ah │ 2 │ SP │ Stack Pointer │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 1Ch │ 2 │ BP │ Base Pointer │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 1Eh │ 2 │ SI │ Source Index │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 20h │ 2 │ DI │ Destination Index │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 22h │ 2 │ ES │ Extra Segment │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 24h │ 2 │ CS │ Code Segment │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 26h │ 2 │ SS │ Stack Segment │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 28h │ 2 │ DS │ Data Segment │
├────────┼──────┼───────────────────┼─────────────────────────┤
│ 2Ah │ 2 │ LDT Selector │ Local Descriptor Table │
└─────────────────────────────────────────────────────────────┘
Memory Layout Visualization
TSS in Physical Memory:
┌─────────────────────────────────────────────────────────────┐
│ Task A's TSS │
│ (44 bytes minimum) │
├─────────────────────────────────────────────────────────────┤
│ Offset 00h: Previous Task = 0x0000 │
│ Offset 02h: Ring 0 SP = 0x7C00 │
│ Offset 04h: Ring 0 SS = 0x0008 │
│ Offset 06h: Ring 1 SP = 0x0000 │
│ Offset 08h: Ring 1 SS = 0x0000 │
│ Offset 0Ah: Ring 2 SP = 0x0000 │
│ Offset 0Ch: Ring 2 SS = 0x0000 │
│ Offset 0Eh: IP = 0x1234 ← Where task will resume │
│ Offset 10h: FLAGS = 0x0202 │
│ Offset 12h: AX = 0x1234 │
│ Offset 14h: CX = 0x5678 │
│ Offset 16h: DX = 0x9ABC │
│ Offset 18h: BX = 0xDEF0 │
│ Offset 1Ah: SP = 0x7FF0 │
│ Offset 1Ch: BP = 0x7FE0 │
│ Offset 1Eh: SI = 0x1000 │
│ Offset 20h: DI = 0x2000 │
│ Offset 22h: ES = 0x0010 │
│ Offset 24h: CS = 0x0008 │
│ Offset 26h: SS = 0x0010 │
│ Offset 28h: DS = 0x0010 │
│ Offset 2Ah: LDT = 0x0028 ← Task's private memory │
└─────────────────────────────────────────────────────────────┘
TSS Descriptor in the GDT
The TSS itself is just a data structure in memory. To use it, there must be a TSS descriptor in the GDT that points to it: (SInce TSS Descriptor is just another entry in GDT, it follows the same pattern as GDT entries)
GDT Entry for TSS:
┌─────────────────────────────────────────────────────────────┐
│ TSS Descriptor (8 bytes) │
├─────────────────────────────────────────────────────────────┤
│ Base Address: 0x00010000 ← Physical address of TSS │
│ Limit: 0x0067 ← TSS size (103 bytes) │
│ Access Byte: 0x89 ← TSS type, Ring 0 │
│ Flags: 0x00 ← Standard flags │
└─────────────────────────────────────────────────────────────┘
Access Byte Breakdown (0x89):
┌─┬─────┬─┬─┬─────┬─┬─┬─┐
│1│ 00 │0│1│ 001 │0│0│1│
└─┴─────┴─┴─┴─────┴─┴─┴─┘
│ │ │ │ │ │ │ │
│ │ │ │ │ │ │ └─ Accessed bit
│ │ │ │ │ │ └─── Reserved
│ │ │ │ │ └───── Busy bit (0=available, 1=busy)
│ │ │ │ └────────── TSS type (1001 = available TSS)
│ │ │ └─────────────── System descriptor (0)
│ │ └───────────────── Reserved
│ └────────────────────── Privilege level (00 = Ring 0)
└───────────────────────── Present (1 = valid)
Key Differences by Descriptor Type
Bits 3-0 Interpretation
Application Descriptors (S=1):
- Bit 3: Executable (1=code, 0=data)
- Bit 2: Direction/Conforming
- Bit 1: Read/Write permission
- Bit 0: Accessed by CPU
System Descriptors (S=0):
- Bits 3-0: System type (TSS, LDT, gates, etc.)
System Types:
0001 = Available 286 TSS
0010 = LDT
0011 = Busy 286 TSS
0100 = 286 Call Gate
0101 = Task Gate
0110 = 286 Interrupt Gate
0111 = 286 Trap Gate
1001 = Available 386 TSS
1011 = Busy 386 TSS
(others reserved)
Task Switching Process
When the CPU executes a task switch instruction, here’s exactly what happens:
Task Switch: JMP 0x0030 ; Jump to task with TSS at GDT entry 6
Hardware Sequence:
┌─────────────────────────────────────────────────────────────┐
│ Step 1: Identify Target Task │
│ • Extract index from selector 0x0030 → Index 6 │
│ • Look up GDT entry 6 → TSS descriptor │
│ • Get TSS base address and verify it's a valid TSS │
├─────────────────────────────────────────────────────────────┤
│ Step 2: Save Current Task State │
│ • Get current TSS address (from TR register) │
│ • Save all CPU registers to current TSS: │
│ - Store AX at TSS+0x12h │
│ - Store CX at TSS+0x14h │
│ - Store DX at TSS+0x16h │
│ - ... (save all registers and flags) │
│ - Store IP at TSS+0x0Eh │
│ - Store segment registers │
├─────────────────────────────────────────────────────────────┤
│ Step 3: Mark Tasks │
│ • Set current TSS descriptor busy bit = 0 (available) │
│ • Set target TSS descriptor busy bit = 1 (busy) │
├─────────────────────────────────────────────────────────────┤
│ Step 4: Load New Task State │
│ • Load all registers from target TSS: │
│ - Load AX from TSS+0x12h │
│ - Load CX from TSS+0x14h │
│ - ... (load all registers and flags) │
│ - Load IP from TSS+0x0Eh │
│ - Load segment registers │
├─────────────────────────────────────────────────────────────┤
│ Step 5: Update Memory Management │
│ • Load LDT selector from TSS+0x2Ah │
│ • Update LDTR register → new task's private memory view │
│ • Flush segment register caches │
├─────────────────────────────────────────────────────────────┤
│ Step 6: Update Task Register │
│ • Store new TSS selector in TR register │
│ • Cache new TSS descriptor in hidden portion │
├─────────────────────────────────────────────────────────────┤
│ Step 7: Continue Execution │
│ • Begin executing at CS:IP from new TSS │
│ • Task switch complete! │
└─────────────────────────────────────────────────────────────┘
Total time: ~17-34 clock cycles (extremely fast!)
Privilege Level Stack Management
Each privilege level (Ring 0-3) needs its own separate stack for each program for security and proper operation:
Why Multiple Stacks are Needed?
Security Problem Without Separate Stacks:
┌─────────────────────────────────────────────────────────────┐
│ User Program (Ring 3) stack contains: │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ User data, local variables, function calls │ │
│ │ Potentially malicious or corrupted data │ │
│ └─────────────────────────────────────────────────────────┘ │
│ │
│ System Call (Ring 3 → Ring 0): │
│ If kernel uses same stack: │
│ ❌ Kernel data mixed with user data │
│ ❌ User could corrupt kernel stack │
│ ❌ Security vulnerability │
│ ❌ Kernel crash could corrupt user stack │
└─────────────────────────────────────────────────────────────┘
Solution - Separate Stacks:
┌─────────────────────────────────────────────────────────────┐
│ Ring 0 Stack (Kernel): │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ Kernel local variables, system call parameters │ │
│ │ Protected from user access │ │
│ └─────────────────────────────────────────────────────────┘ │
│ │
│ Ring 3 Stack (User): │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ User program data, function calls │ │
│ │ Cannot affect kernel operations │ │
│ └─────────────────────────────────────────────────────────┘ │
└─────────────────────────────────────────────────────────────┘
Stack Pointer (SP) and Stack Segment (SS) Explained
- Stack Pointer (SP): The offset within the stack segment where the stack currently “points”
- Stack Segment (SS): The selector that identifies which memory segment contains the stack
How Stack Switching Works?
Privilege Level Change Example:
User Program (Ring 3) makes system call:
┌─────────────────────────────────────────────────────────────┐
│ Current State: │
│ SS = 0x0010 (user data segment) │
│ SP = 0x7FF0 (user stack pointer) │
│ CPL = 3 (Ring 3) │
└─────────────────────────────────────────────────────────────┘
│
▼ INT 21h (system call)
┌─────────────────────────────────────────────────────────────┐
│ Hardware automatically: │
│ 1. Detects privilege change: Ring 3 → Ring 0 │
│ 2. Gets Ring 0 stack from current TSS: │
│ SS0 = 0x0008, SP0 = 0x7C00 │
│ 3. Switches to Ring 0 stack: │
│ SS = 0x0008, SP = 0x7C00 │
│ 4. Pushes Ring 3 context onto Ring 0 stack: │
│ - Push old SS (0x0010) │
│ - Push old SP (0x7FF0) │
│ - Push FLAGS │
│ - Push CS │
│ - Push IP │
│ 5. Loads interrupt handler address │
└─────────────────────────────────────────────────────────────┘
│
▼
┌────────────────────────────────────────────────────────────┐
│ Now Running in Ring 0: │
│ SS = 0x0008 (kernel data segment) │
│ SP = 0x7BF6 (adjusted after pushes) │
│ CPL = 0 (Ring 0) │
│ │
│ Ring 0 stack now contains: │
│ [SP+12]: Old SS (0x0010) │
│ [SP+10]: Old SP (0x7FF0) │
│ [SP+8]: Old FLAGS │
│ [SP+6]: Old CS │
│ [SP+4]: Old IP │
│ [SP+2]: (space for kernel use) │
│ [SP+0]: (current stack top) │
└────────────────────────────────────────────────────────────┘
Ring 1 and Ring 2 Stacks
Ring Usage in Practice:
┌─────────────────────────────────────────────────────────────┐
│ Ring 0: Operating System Kernel │
│ • SS0/SP0: Most critical system operations │
│ • Memory management, process switching │
│ • Hardware interrupt handlers │
├─────────────────────────────────────────────────────────────┤
│ Ring 1: Device Drivers (Rarely Used) │
│ • SS1/SP1: Device driver code │
│ • Some operating systems use this for drivers │
│ • Most modern systems use Ring 0 for drivers │
├─────────────────────────────────────────────────────────────┤
│ Ring 2: System Services (Rarely Used) │
│ • SS2/SP2: System service layer │
│ • Most systems jump directly from Ring 3 to Ring 0 │
│ • Some experimental OS designs used this │
├─────────────────────────────────────────────────────────────┤
│ Ring 3: User Applications │
│ • SS/SP: Normal application stack │
│ • Regular program execution │
│ • Cannot directly access lower rings │
└─────────────────────────────────────────────────────────────┘
Typical Stack Usage:
Most 80286 systems only used Ring 0 and Ring 3:
- SS0/SP0: Kernel stack
- SS1/SP1: Usually 0 (unused)
- SS2/SP2: Usually 0 (unused)
- SS/SP: User application stack
When user program makes system call:
- Hardware saves user context on kernel stack (SS0:SP0)
- Kernel operations use kernel stack space
- When returning, hardware restores user context
- User program continues with user stack (SS:SP)
Why Each Program Gets its own Kernel Stack Even though Kernel Code is Common for all?
If there was only one kernel stack for the entire OS, here’s what would happen:
Single Global Kernel Stack Problem:
┌─────────────────────────────────────────────────────────────┐
│ Task A makes system call: │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ Global Kernel Stack: │ │
│ │ [Task A's saved context] │ │
│ │ [Kernel local variables for Task A] │ │
│ │ [System call parameters] │ │
│ └─────────────────────────────────────────────────────────┘ │
│ │
│ Timer interrupt occurs → Task Switch to Task B: │
│ ❌ Task A's kernel context still on global stack! │
│ │
│ Task B makes system call: │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ Global Kernel Stack (CORRUPTED): │ │
│ │ [Task A's saved context] ← Still there! │ |
│ │ [Task A's kernel variables] ← Still there! │ |
│ │ [Task B's saved context] ← New data overwrites! │ │
│ │ [Task B's kernel variables] │ │
│ └─────────────────────────────────────────────────────────┘ │
│ │
│ When Task A resumes: │
│ ❌ Its kernel context is corrupted │
│ ❌ System crash or data corruption │
└─────────────────────────────────────────────────────────────┘
Why Each Task Needs Its Own Kernel Stack
Each task gets its own kernel stack because:
- Task can be preempted while in kernel mode
- Kernel context must be preserved per task
- Multiple tasks can have pending system calls
- Recursion and nested operations
Shared Kernel Segment, Separate Stack Areas
The kernel memory segment is shared, but each task gets its own stack area within that segment:
Kernel Memory Layout:
┌────────────────────────────────────────────────────────────┐
│ Kernel Data Segment (Selector 0x0008) │
│ Base Address: 0x100000 │
├────────────────────────────────────────────────────────────┤
│ 0x100000: Kernel Code │
│ 0x110000: Kernel Global Data │
│ 0x120000: Kernel Heap │
│ 0x130000: ┌─────────────────────────────────────────────┐ │
│ │ Task A Kernel Stack │ │
│ 0x131000: │ ← Task A's SS0:SP0 = 0x0008:0x31000 │ │
│ └─────────────────────────────────────────────┘ │
│ 0x131000: ┌─────────────────────────────────────────────┐ │
│ │ Task B Kernel Stack │ │
│ 0x132000: │ ← Task B's SS0:SP0 = 0x0008:0x32000 │ │
│ └────────────────────────────────────────-────┘ │
│ 0x132000: ┌─────────────────────────────────────────────┐ │
│ │ Task C Kernel Stack │ │
│ 0x133000: │ ← Task C's SS0:SP0 = 0x0008:0x33000 │ │
│ └-────────────────────────────────────────────┘ │
│ 0x140000: Other Kernel Data │
└────────────────────────────────────────────────────────────┘
Key Point: Same SS0 (0x0008), Different SP0 values
TSS Stack Pointer Management
Task Creation Process:
┌─────────────────────────────────────────────────────────────┐
│ When OS creates new task: │
│ │
│ 1. Allocate kernel stack space: │
│ kernel_stack_base = allocate_kernel_stack() │
│ // Returns something like 0x31000 │
│ │
│ 2. Set up TSS: │
│ task_tss.SS0 = KERNEL_DATA_SELECTOR // 0x0008 │
│ task_tss.SP0 = kernel_stack_base // 0x31000 │
│ │
│ 3. When task makes system call: │
│ Hardware automatically switches to SS0:SP0 │
│ Now using this task's private kernel stack area │
│ │
│ 4. When task switch occurs: │
│ Each task's kernel stack remains intact │
│ Next task uses its own SS0:SP0 values │
└─────────────────────────────────────────────────────────────┘
Real-World Example: System Call with Task Switch
Scenario: Task A calls file read, gets blocked, Task B runs
Step 1: Task A makes system call
┌─────────────────────────────────────────────────────────────┐
│ Task A (Ring 3): INT 21h ; Read file │
│ │
│ Hardware switches to Task A's kernel stack: │
│ SS = 0x0008, SP = 0x31000 (Task A's kernel stack) │
│ │
│ Task A's Kernel Stack (0x31000): │
│ [Task A's user SS:SP] │
│ [Task A's user FLAGS] │
│ [Task A's user CS:IP] │
│ [Kernel local variables for file operation] │
│ [File system state] │
└─────────────────────────────────────────────────────────────┘
Step 2: File not ready, Task A blocks
┌─────────────────────────────────────────────────────────────┐
│ Kernel: File not available, block Task A │
│ │
│ Kernel performs task switch to Task B: │
│ JMP task_b_selector │
│ │
│ Hardware saves current state to Task A's TSS: │
│ - Current SS (0x0008) → Task A TSS │
│ - Current SP (0x30F80) → Task A TSS ← Note: changed! │
│ - All registers → Task A TSS │
│ │
│ Hardware loads Task B's state: │
│ - SS = Task B's user SS │
│ - SP = Task B's user SP │
│ - SS0 = 0x0008, SP0 = 0x32000 ← Task B's kernel stack │
└─────────────────────────────────────────────────────────────┘
Step 3: Task B runs and makes system call
┌─────────────────────────────────────────────────────────────┐
│ Task B (Ring 3): INT 10h ; Video operation │
│ │
│ Hardware switches to Task B's kernel stack: │
│ SS = 0x0008, SP = 0x32000 (Task B's kernel stack) │
│ │
│ Memory State: │
│ Task A's Kernel Stack (0x31000): [Preserved file operation] │
│ Task B's Kernel Stack (0x32000): [New video operation] │
│ │
│ Both stacks coexist safely! │
└─────────────────────────────────────────────────────────────┘
Step 4: Task A resumes later
┌─────────────────────────────────────────────────────────────┐
│ File becomes available, switch back to Task A: │
│ JMP task_a_selector │
│ │
│ Hardware loads Task A's state from TSS: │
│ - SS = 0x0008, SP = 0x30F80 ← Back to Task A kernel stack │
│ │
│ Task A's kernel stack is exactly as it was left: │
│ [Task A's user context] │
│ [File operation state] ← Still there! │
│ [Kernel variables] ← All preserved! │
│ │
│ Kernel completes file operation and returns to user │
└─────────────────────────────────────────────────────────────┘
Why This Design Is Necessary
Fundamental Requirements
- Reentrancy: Multiple tasks can be “inside” the kernel simultaneously
- Preemption: Tasks can be switched even while in kernel mode
- State Preservation: Each task’s kernel context must survive task switches
- Isolation: One task’s kernel operations can’t interfere with another’s
Alternative Approaches (Used in Some Systems)
Alternative 1: Non-preemptive Kernel
┌─────────────────────────────────────────────────────────────┐
│ • Only one task in kernel at a time │
│ • Disable task switching during system calls │
│ • Simpler: can use single kernel stack │
│ • Problem: Poor responsiveness, no true multitasking │
└─────────────────────────────────────────────────────────────┘
Alternative 2: Kernel Threads (Modern Approach)
┌─────────────────────────────────────────────────────────────┐
│ • Separate kernel thread handles each system call │
│ • User task blocks, kernel thread continues │
│ • More complex but better scalability │
│ • Used in modern operating systems │
└─────────────────────────────────────────────────────────────┘
The Stack Collision Problem
How Stack Collision Occurs
Stack Growth Problem:
┌─────────────────────────────────────────────────────────────┐
│ Normal State: │
│ 0x130000: ┌────────────────────────────────────────── ───┐ │
│ │ Task A Kernel Stack │ │
│ │ [Some data] │ │
│ │ [Some data] │ │
│ 0x130800: │ ← Current SP0 (stack grows down) │ │
│ │ [Free space] │ │
│ 0x131000: └─────────────────────────────────────────────┘ │
│ 0x131000: ┌──────────────────────────────────────────── ─┐ │
│ │ Task B Kernel Stack │ │
│ 0x131800: │ ← Current SP0 │ │
│ │ [Free space] │ │
│ 0x132000: └─────────────────────────────────────────────┘ │
└─────────────────────────────────────────────────────────────┘
Stack Overflow Scenario:
┌─────────────────────────────────────────────────────────────┐
│ Task A makes deep system call with many nested functions: │
│ 0x130000: ┌───────────────────────────────────────────── ┐ │
│ │ Task A Kernel Stack │ │
│ │ [Deep call stack] │ │
│ │ [Local variables] │ │
│ │ [More function calls] │ │
│ │ [Even more data] │ │
│ 0x130F00: │ ← SP0 approaching limit │ │
│ │ [Critical: Almost full!] │ │
│ 0x131000: └─────────────────────────────────────────────┘ │
│ 0x131000: ┌─────────────────────────────────────────── ──┐ │
│ │ Task B Kernel Stack ← CORRUPTED! │ │
│ │ [Task A overflow data] ← Wrong task data! │ │
│ 0x131800: │ ← Task B's SP0 │ │
│ 0x132000: └─────────────────────────────────────────────┘ │
│ │
│ Result: Task A corrupts Task B's kernel stack │
│ System crash, data corruption, security breach │
└─────────────────────────────────────────────────────────────┘
Real-World Solutions
1. Stack Size Planning and Limits
Conservative Stack Allocation:
┌─────────────────────────────────────────────────────────────┐
│ Better Layout with Larger Gaps: │
├─────────────────────────────────────────────────────────────┤
│ 0x130000: ┌─────────────────────────────────────────────┐ │
│ │ Task A Kernel Stack (8KB) │ │
│ 0x132000: └─────────────────────────────────────────────┘ │
│ 0x132000: ┌─────────────────────────────────────────────┐ │
│ │ Task B Kernel Stack (8KB) │ │
│ 0x134000: └─────────────────────────────────────────────┘ │
│ 0x134000: ┌──────────────────────────────────────────-──┐ │
│ │ Task C Kernel Stack (8KB) │ │
│ 0x136000: └─────────────────────────────────────────────┘ │
│ │
│ Advantages: │
│ ✅ Larger stacks reduce overflow risk │
│ ✅ Clear boundaries │
│ ❌ Wastes memory if stacks are small │
└─────────────────────────────────────────────────────────────┘
2. Guard Pages (Modern Approach)
Stack with Guard Pages:
┌─────────────────────────────────────────────────────────────┐
│ 0x130000: ┌───────────────────────────────────────--────┐ │
│ │ Task A Kernel Stack (4KB) │ │
│ 0x131000: └─────────────────────────────────────────────┘ │
│ 0x131000: ┌────────────────────────────────────────--───┐ │
│ │ GUARD PAGE (unmapped/protected) │ │
│ 0x132000: └─────────────────────────────────────────────┘ │
│ 0x132000: ┌───────────────────────────────────────-─────┐ │
│ │ Task B Kernel Stack (4KB) │ │
│ 0x133000: └─────────────────────────────────────────────┘ │
│ │
│ How it works: │
│ • Guard page has no memory mapped │
│ • Stack overflow triggers page fault │
│ • Kernel can detect and handle gracefully │
│ • Kill offending task instead of corrupting memory │
└─────────────────────────────────────────────────────────────┘
3. Stack Bounds Checking
; Kernel stack overflow detection
check_stack_overflow:
mov ax, sp ; Get current stack pointer
cmp ax, stack_limit ; Compare with minimum allowed
jb stack_overflow_handler ; Jump if below limit
ret
stack_overflow_handler:
; Emergency handling:
; 1. Log the error
; 2. Kill the current task
; 3. Switch to a safe task
; 4. Prevent system crash
4. Dynamic Stack Expansion (Advanced)
Expandable Stacks:
┌─────────────────────────────────────────────────────────────┐
│ Initial Allocation (Small): │
│ 0x130000: ┌─────────────────────────────────────────────┐ │
│ │ Task A Initial Stack (1KB) │ │
│ 0x130400: └─────────────────────────────────────────────┘ │
│ │ Expansion Area (monitored) │ │
│ 0x131000: ┌─────────────────────────────────────────────┐ │
│ │ Task B Initial Stack (1KB) │ │
│ 0x131400: └─────────────────────────────────────────────┘ │
│ │
│ On Near-Overflow: │
│ • Kernel detects stack approaching limit │
│ • Allocates more space if available │
│ • Updates stack boundaries │
│ • Continues operation │
└─────────────────────────────────────────────────────────────┘
What 80286 Systems Actually Did
Typical 80286 Approach:
┌────────────────────────────────────────────────────────────┐
│ Conservative Fixed Allocation: │
│ │
│ 1. Large Fixed Stack Sizes: │
│ • Each task: 4KB-8KB kernel stack │
│ • Over-provision to avoid overflow │
│ • Waste memory but ensure safety │
│ │
│ 2. Task Limits: │
│ • Limit number of concurrent tasks │
│ • Reduce memory pressure │
│ • Simpler management │
│ │
│ 3. Programming Discipline: │
│ • Avoid deep recursion in kernel │
│ • Minimize local variables │
│ • Use heap for large data structures │
│ │
│ 4. System Monitoring: │
│ • Debug builds check stack usage │
│ • Runtime stack depth monitoring │
│ • Early warning systems │
└────────────────────────────────────────────────────────────┘
Example: OS/2 Approach
OS/2 Stack Management:
┌─────────────────────────────────────────────────────────────┐
│ Thread Creation: │
│ • Default kernel stack: 8KB per thread │
│ • Configurable stack sizes │
│ • Stack committed on demand │
│ │
│ Stack Layout: │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ Thread 1: 8KB kernel stack │ │
│ │ Thread 2: 8KB kernel stack │ │
│ │ Thread 3: 8KB kernel stack │ │
│ │ (Large gaps to prevent collision) │ │
│ └─────────────────────────────────────────────────────────┘ │
│ │
│ Protection: │
│ • Memory manager tracks allocations │
│ • Stack overflow detected by memory manager │
│ • Graceful task termination instead of corruption │
└─────────────────────────────────────────────────────────────┘
How Modern Systems Handle This
Modern Approach (Linux/Windows):
┌─────────────────────────────────────────────────────────────┐
│ Virtual Memory + Guard Pages: │
│ │
│ Each process/thread gets: │
│ • Virtual address space │
│ • Guard pages at stack boundaries │
│ • Page fault handling for overflow │
│ • Dynamic expansion up to limits │
│ │
│ Benefits: │
│ ✅ No memory waste │
│ ✅ Automatic protection │
│ ✅ Scales to thousands of threads │
│ ✅ Hardware-assisted detection │
│ │
│ 80286 Limitations: │
│ ❌ No virtual memory/paging │
│ ❌ Limited memory management │
│ ❌ Must use simpler approaches │
└─────────────────────────────────────────────────────────────┘
Previous TSS Link
The Previous TSS Link supports task calling chains - when one task calls another task (not just jumps to it).
Task Calling vs Task Jumping:
Task Jump (JMP):
Task A ──JMP──→ Task B
│
└─ Task A stops, Task B runs
No way to return to Task A
Task Call (CALL):
Task A ──CALL──→ Task B ──IRET──→ Task A
│ │
└─ Task A suspended ──────┘
Task B can return to Task A
How Previous Task Link Works
Example Task Calling Chain:
Step 1: Main Program calls Print Service
┌─────────────────────────────────────────────────────────────┐
│ Main Program TSS (Selector 0x0030) │
│ Previous Link: 0x0000 (no caller) │
│ CALL 0x0038 ; Call Print Service Task │
└─────────────────────────────────────────────────────────────┘
│
▼
┌─────────────────────────────────────────────────────────────┐
│ Print Service TSS (Selector 0x0038) │
│ Previous Link: 0x0030 ← Points back to Main Program │
│ CALL 0x0040 ; Call File I/O Task │
└─────────────────────────────────────────────────────────────┘
│
▼
┌─────────────────────────────────────────────────────────────┐
│ File I/O TSS (Selector 0x0040) │
│ Previous Link: 0x0038 ← Points back to Print Service │
│ IRET ; Return to previous task │
└─────────────────────────────────────────────────────────────┘
When File I/O executes IRET:
1. CPU reads Previous Link (0x0038)
2. Switches back to Print Service TSS
3. Print Service continues where it left off
When Print Service executes IRET:
1. CPU reads Previous Link (0x0030)
2. Switches back to Main Program TSS
3. Main Program continues after the CALL
Hardware Behavior
CALL task_selector behavior:
1. Save current state to current TSS
2. Set target TSS Previous Link = current TSS selector
3. Switch to target task
4. Target task can later use IRET to return
JMP task_selector behavior:
1. Save current state to current TSS
2. Target TSS Previous Link unchanged (usually 0)
3. Switch to target task
4. No automatic return mechanism
TSS Benefits and Limitations
Advantages of Hardware Task Switching
1. Atomic Operation
- Complete task switch in single instruction
- Cannot be interrupted midway
- Guaranteed consistent state
2. Performance
- Extremely fast: ~17-34 clock cycles
- No manual register save/restore needed
- Hardware optimized
3. Reliability
- Cannot forget to save registers
- Hardware enforced privilege management
- Automatic stack switching
4. Security
- Memory isolation through LDT switching
- Privilege level enforcement
- Protected task linkage
Limitations and Problems
1. Memory Overhead
Each task requires:
- 44+ bytes for TSS
- 8 bytes for TSS descriptor in GDT
- Separate stacks for each privilege level
- Private LDT (optional but recommended)
For 100 tasks: ~5KB just for task management
2. GDT Size Limitations
GDT maximum size: 65536 bytes
Each TSS descriptor: 8 bytes
Maximum tasks: ~8000 (practical limit much lower)
3. Inflexibility
- Fixed TSS structure
- Cannot customize task switch behavior
- All-or-nothing: must save ALL registers
- Cannot optimize for specific use cases
4. Scalability Issues
Modern systems with thousands of threads:
- Would need thousands of TSS structures
- GDT would become enormous
- Memory fragmentation problems
Evolution Beyond 80286
Why Modern Systems Don’t Use Hardware Task Switching
Modern Software Task Switching:
┌─────────────────────────────────────────────────────────────┐
│ Advantages: │
│ ✅ Flexible task structure │
│ ✅ Can save only necessary registers │
│ ✅ Custom scheduling algorithms │
│ ✅ Supports unlimited tasks │
│ ✅ More efficient memory usage │
│ ✅ Better cache performance │
│ │
│ Trade-offs: │
│ ❌ More complex kernel code │
│ ❌ Slightly slower (but caches help) │
│ ❌ Must be carefully implemented │
└─────────────────────────────────────────────────────────────┘
Legacy of TSS
Even though modern x86 systems don’t use hardware task switching for multitasking, the TSS remains important:
- One TSS per CPU for privilege level stack management
- System call stack switching still uses TSS stack pointers
- Interrupt handling relies on TS
The Memory Management Unit (MMU)
The 80286 was the first x86 processor to introduce an MMU (Memory Management Unit), but it was a simpler form than what we consider a “full” MMU today. The MMU in the 80286 is a hardware component integrated into the CPU chip itself. THe main purpose of MMU is to translate virtual addresses into physical addresses, along with checking bounds, enforcing privileges, etc.
Key MMU Functions Introduced by 80286
1. Hardware Address Translation
; 8086 - Software calculation:
; Physical = (DS × 16) + SI
; 80286 - Hardware MMU translation:
MOV DS, 0x0008 ; Load selector (points to descriptor)
MOV AL, [SI] ; MMU automatically:
; 1. Looks up descriptor for selector 0x0008
; 2. Checks permissions and bounds
; 3. Translates to physical address
2. Memory Protection
Descriptor Access Rights (enforced by MMU):
┌─┬─-─┬─┬─┬-─┬─-┬─┐
│P│DPL│S│E│DC│RW│A│ ← MMU checks these bits
└─┴─-─┴─┴─┴─-┴-─┴─┘
│ │ │ │ │ │ │
│ │ │ │ │ │ └─ Accessed (set by MMU)
│ │ │ │ │ └──── Read/Write permission
│ │ │ │ └─────── Direction/Conforming
│ │ │ └───────── Executable bit
│ │ └─────────── Descriptor type
│ └────────────── Privilege level (0-3)
└──────────────── Present bit
MMU generates protection fault if access violates these rules
3. Bounds Checking
Every memory access checked by MMU:
┌─────────────────────────────────────────┐
│ Descriptor Limit = 0x7FFF (32KB) │
│ Offset = 0x1234 │
│ MMU Check: 0x1234 ≤ 0x7FFF? ✓ Allow │
│ │
│ Offset = 0x9000 │
│ MMU Check: 0x9000 ≤ 0x7FFF? ✗ Fault │
└─────────────────────────────────────────┘
80286 MMU Components
1. Segment Register Cache (Hidden Descriptor Cache)
What Would Happen Without Segment Register Cache
Every Memory Access Without Cache:
┌─────────────────────────────────────────────────────────────┐
│ Program executes: MOV AL, [DS:0x1234] │
│ │
│ Without caching, MMU would need to: │
│ 1. Read DS selector: 0x0010 │
│ 2. Extract index: 2 (from bits 15-3) │
│ 3. Calculate GDT address: GDT_base + (2 × 8) │
│ 4. Read 8 bytes from memory (descriptor) │ ← Memory access #1
│ 5. Extract base address from descriptor │
│ 6. Add offset: base + 0x1234 │
│ 7. Finally access target memory │ ← Memory access #2
│ │
│ Result: Every memory access requires TWO memory reads! │
│ Performance: 50% of memory bandwidth wasted on translation │
└─────────────────────────────────────────────────────────────┘
How Each Segment Register Actually Works
Complete Segment Register Structure:
┌─────────────────────────────────────────────────────────────┐
│ DS Register │
├─────────────────────────────────────────────────────────────┤
│ Visible Part (16 bits) - What programmer sees: │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ Selector: 0x0010 │ │
│ └─────────────────────────────────────────────────────────┘ │
├─────────────────────────────────────────────────────────────┤
│ Hidden Cache (64 bits) - Hardware only: │
│ ┌─────────────────┬─────────────┬─────────────────────────┐ │
│ │ Base Address │ Limit │ Access Rights │ │
│ │ 0x00200000 │ 0xFFFF │ Ring 3, Read/Write │ │
│ │ (Physical addr) │ (Segment sz)│ (Permissions) │ │
│ └─────────────────┴─────────────┴─────────────────────────┘ │
├─────────────────────────────────────────────────────────────┤
│ Valid Bit: 1 (cache contains valid data) │
└─────────────────────────────────────────────────────────────┘
Instead of caching all GDT/LDT entries at MMU level, each segment register caches only one GDT/LDT entry - the one it currently points to:
Individual Segment Register Caches:
┌─────────────────────────────────────────────────────────────┐
│ CS Register: │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ Visible: 0x0008 (selector) │ │
│ │ Hidden: [Base: 0x100000, Limit: 0xFFFF, Access: R/X] │ │
│ └─────────────────────────────────────────────────────────┘ │
├─────────────────────────────────────────────────────────────┤
│ DS Register: │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ Visible: 0x0010 (selector) │ │
│ │ Hidden: [Base: 0x200000, Limit: 0xFFFF, Access: R/W] │ │
│ └─────────────────────────────────────────────────────────┘ │
├─────────────────────────────────────────────────────────────┤
│ ES Register: │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ Visible: 0x0018 (selector) │ │
│ │ Hidden: [Base: 0x300000, Limit: 0x7FFF, Access: R/W] │ │
│ └─────────────────────────────────────────────────────────┘ │
├─────────────────────────────────────────────────────────────┤
│ SS Register: │
│ ┌─────────────────────────────────────────────────────────┐ │
│ │ Visible: 0x0020 (selector) │ │
│ │ Hidden: [Base: 0x400000, Limit: 0x1FFF, Access: R/W] │ │
│ └─────────────────────────────────────────────────────────┘ │
└─────────────────────────────────────────────────────────────┘
Each register caches ONE descriptor from GDT/LDT
Cache Loading Process
When Segment Register Is Loaded:
┌─────────────────────────────────────────────────────────────┐
│ Program executes: MOV DS, AX (AX = 0x0010) │
│ │
│ Hardware automatically: │
│ 1. Store 0x0010 in DS visible part │
│ 2. Extract index: 2 │
│ 3. Calculate descriptor address: GDT_base + 16 │
│ 4. Read descriptor from memory (8 bytes) │
│ 5. Parse descriptor into components: │
│ - Base = 0x00200000 │
│ - Limit = 0xFFFF │
│ - Access = Ring 3, Read/Write │
│ 6. Store in DS hidden cache │
│ 7. Set valid bit = 1 │
│ │
│ This happens ONCE when segment register is loaded │
└─────────────────────────────────────────────────────────────┘
Fast Address Translation with Cache
Fast Memory Access Using Cache:
┌─────────────────────────────────────────────────────────────┐
│ Program executes: MOV AL, [DS:0x1234] │
│ │
│ MMU hardware: │
│ 1. Check DS cache valid bit: 1 ✓ │
│ 2. Get base from DS cache: 0x00200000 │
│ 3. Get limit from DS cache: 0xFFFF │
│ 4. Check bounds: 0x1234 ≤ 0xFFFF ✓ │
│ 5. Calculate address: 0x00200000 + 0x1234 = 0x00201234 │
│ 6. Access memory at 0x00201234 │
│ │
│ Total: ONE memory access (the actual data) │
│ No GDT lookup needed! │
└─────────────────────────────────────────────────────────────┘
Cache Invalidation and Management
Cache Invalidation Scenarios:
┌─────────────────────────────────────────────────────────────┐
│ 1. Segment Register Reload: │
│ MOV DS, AX ; New selector → invalidate DS cache │
│ │
│ 2. Task Switch: │
│ JMP task_selector ; All caches invalidated │
│ │
│ 3. GDT/LDT Reload: │
│ LGDT [gdt_desc] ; All caches invalidated │
│ LLDT selector ; All LDT-based caches invalidated │
│ │
│ 4. Descriptor Modification: │
│ If OS modifies GDT/LDT in memory │
│ Must manually invalidate affected caches │
└─────────────────────────────────────────────────────────────┘
What the 80286 MMU Provided
Segmentation-Based Memory Management The 80286’s MMU implemented:
- Address translation via descriptor tables (GDT/LDT)
- Memory protection with privilege levels (rings 0-3)
- Bounds checking to prevent segment overruns
- Access control (read/write/execute permissions)
What 80286 MMU Lacked
No Virtual Memory
- All segments had to exist in physical memory
- No demand paging or swapping to disk
- No virtual address spaces larger than physical memory
No Page-Level Protection
- Segment-level only - coarse-grained protection
- Cannot protect individual pages within segments
- Limited memory layout flexibility
No Address Space Isolation
- Shared physical address space among all tasks
- Tasks could potentially access each other’s memory if descriptors allowed it
- No true virtual memory isolation
Historical Significance
The 80286 MMU was revolutionary for its time because it:
Introduced Hardware Memory Protection:
- First x86 processor with privilege levels
- Hardware-enforced protection (couldn’t be bypassed by software)
- Foundation for modern operating systems
Enabled Multitasking:
- Task isolation through separate descriptor tables
- Controlled access to system resources
- Protection from application crashes
Set Architecture Foundation:
- Descriptor table concept carried forward to 80386
- Privilege level system still used today
- Segmentation principles (though largely superseded by paging)
While the 80286’s MMU was simpler than modern MMUs, it represented the crucial first step from the 8086’s “wild west” of direct memory access to the protected, managed memory systems we use today. The 80386 would later add paging to create the “full” MMU architecture that became the standard for modern computing.
How 80286 Keeps Track of the CPU Mode
CR0 (Control Register 0) also called as MSW (Machine Status Word) stored PE bit (bit 0) which kept track of thr current processor mode.
CR0 Register and the PE Bit
CR0 Register (16-bit in 80286):
┌─────────────────────────────────────────────────────────────---┐
│ 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 │
├───────────────────────────────────────────────────────────---──┤
│ Reserved │PE │
│ (bits 15-1) │ │
└──────────────────────────────────────────────────---───────────┘
│
└─ PE (Protection Enable) bit
PE Bit (Bit 0):
- PE = 0: Real mode (8086 compatibility mode)
- PE = 1: Protected mode (full 80286 protection features)
Real Mode to Protected Mode Switch
; Switching from real mode to protected mode
enter_protected_mode:
cli ; Disable interrupts
; Set up GDT
lgdt [gdt_descriptor]
; Set up IDT
lidt [idt_descriptor]
; Enable protected mode
mov ax, cr0
or ax, 1 ; Set PE bit (bit 0)
mov cr0, ax ; CR0.PE = 1 → Protected mode
; Far jump to flush instruction queue
jmp 0x0008:protected_start ; Jump to protected mode code
protected_start:
; Now in protected mode
; Set up segment registers
mov ax, 0x0010 ; Data segment selector
mov ds, ax
mov es, ax
mov ss, ax
sti ; Re-enable interrupts
ret
Only Ring 0 code can modify CR0 - this is one of the most fundamental privilege restrictions in the 80286. There was no way to switch back to real mode once the CPU enters protected mode in 80286.
Ring Level Privileges in 80286
One of the most revolutionary features introduced by the Intel 80286 was its ring-based privilege system - a hardware-enforced security mechanism that fundamentally changed how computer systems protect themselves from malicious or buggy software. Before the 80286, programs had unrestricted access to all system resources, meaning a single misbehaving application could crash the entire computer or corrupt critical system data.
The 80286’s ring system solved this by creating four distinct privilege levels (Rings 0-3), arranged in a hierarchical structure where each ring has specific permissions and access rights. Think of it like security clearance levels in a government building - higher clearance (lower ring numbers) grants access to more sensitive areas, while lower clearance (higher ring numbers) restricts what you can access.
The 80286’s ring system introduced hardware-enforced separation between different types of code, ensuring that:
- User applications (Ring 3) could only access their own resources
- Operating system code (Ring 0) maintained exclusive control over critical hardware
- Device drivers (Ring 1) had controlled access to specific hardware components
- System services (Ring 2) provided a middle layer for specialized operations

Modern CPU’s removed ring 1 and ring 2 as they are not used by any applications because of complex privilege transitions.
Ring 0: The Kernel Domain
Ring 0 represents the most trusted code in the system - the operating system kernel itself. Capabilities:
- Direct hardware access: Can manipulate any I/O port, memory location, or CPU register
- Memory management: Controls virtual memory, page tables, and segment descriptors
- Interrupt handling: Manages hardware interrupts and system exceptions
- Task switching: Can switch between different processes and threads
- Protection control: Can modify GDT, LDT, and other protection structures
What runs in Ring 0:
Typical Ring 0 Components:
┌─────────────────────────────────────────────────────────────┐
│ • Kernel core (scheduler, memory manager) │
│ • Device drivers (disk, network, graphics) │
│ • Interrupt service routines │
│ • System call handlers │
│ • Hardware abstraction layer │
└─────────────────────────────────────────────────────────────┘
Example Ring 0 Operations:
; Ring 0 can directly manipulate hardware
OUT 0x3F8, AL ; Write to serial port
CLI ; Disable interrupts
STI ; Enable interrupts
LGDT [gdt_desc] ; Load new GDT
Ring 1: Device Driver Territory
Ring 1 was designed for device drivers and hardware abstraction layers that need some hardware access but shouldn’t have full kernel privileges.
Intended capabilities:
- Limited hardware access: Can access specific I/O ports assigned to devices
- Kernel service calls: Can call Ring 0 services for memory allocation
- Device management: Direct control over assigned hardware devices
- Protected from user code: User programs cannot directly call Ring 1 code
Why it’s rarely used:
Problems with Ring 1:
┌─────────────────────────────────────────────────────────────┐
│ • Complex permission management │
│ • Performance overhead of privilege transitions │
│ • Difficult debugging across privilege boundaries │
│ • Limited benefits over Ring 0 drivers │
│ • Most hardware needs either full access or none │
└─────────────────────────────────────────────────────────────┘
Historical usage:
- Early OS/2: Attempted to use Ring 1 for some device drivers
- Research systems: Academic projects exploring multi-level protection
- Embedded systems: Some real-time systems with strict separation requirements
Ring 2: System Services Layer
Ring 2 was envisioned as a middle layer for system services that needed more privilege than user applications but less than the kernel.
Intended purposes:
- File system services: Higher-level file operations
- Network protocol stacks: TCP/IP implementation
- Graphics subsystems: Advanced display management
- Database engines: System-level data management
Why it failed in practice:
Ring 2 Challenges:
┌─────────────────────────────────────────────────────────────┐
│ • Unclear boundaries between Ring 1 and Ring 2 │
│ • Most services either needed full kernel access or none │
│ • Complex inter-ring communication protocols │
│ • Performance penalties for frequent ring transitions │
│ • Debugging and troubleshooting complexity │
└─────────────────────────────────────────────────────────────┘
Ring 3: User Application Space
Ring 3 is where all user applications run - from simple utilities to complex programs like word processors and games.
Restrictions:
- No direct hardware access: Cannot use IN/OUT instructions
- No privileged instructions: Cannot modify system registers
- Limited memory access: Can only access memory explicitly allocated to the process
- No interrupt control: Cannot disable interrupts or modify interrupt vectors
- No system structure modification: Cannot change GDT, LDT, or page tables
What Ring 3 can do:
Ring 3 Capabilities:
┌─────────────────────────────────────────────────────────────┐
│ • Access own allocated memory │
│ • Perform computational operations │
│ • Call system services via controlled interfaces │
│ • Communicate with other Ring 3 processes (if permitted) │
│ • Use standard library functions │
└─────────────────────────────────────────────────────────────┘
Privilege Enforcement Mechanisms
Current Privilege Level (CPL)
The Current Privilege Level determines what the processor can do at any given moment. It’s stored in the lowest 2 bits of the CS (Code Segment) register.
CS Register Structure:
┌─────────────────────────────────────────────────────────---────┐
│ 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 │
├─────────────────────────────────────────────────────┬───┬───-──┤
│ Segment Index │TI │ CPL │
└─────────────────────────────────────────────────────┴───┴──-───┘
│
└─ Current Privilege Level (0-3)
Level (0-3)
CPL Examples:
- CPL = 0: Currently executing Ring 0 (kernel) code
- CPL = 3: Currently executing Ring 3 (user) code
Descriptor Privilege Level (DPL)
Every segment descriptor (GDT entries) contains a Descriptor Privilege Level that specifies what privilege level is required to access that segment.
Access Control Rule:
CPL ≤ DPL (numerically)
Examples:
- CPL = 0, DPL = 2 → 0 ≤ 2 ✓ Access Allowed
- CPL = 3, DPL = 0 → 3 ≤ 0 ✗ Access Denied
- CPL = 1, DPL = 3 → 1 ≤ 3 ✓ Access Allowed
Privilege Checking Process
When code attempts to access a segment, the 80286 MMU performs automatic privilege checking:
Memory Access Privilege Check:
┌─────────────────────────────────────────────────────────────┐
│ 1. Extract CPL from CS register │
│ 2. Load descriptor for target segment │
│ 3. Extract DPL from descriptor │
│ 4. Check: CPL ≤ DPL? │
│ - YES: Allow access │
│ - NO: Generate General Protection Fault (#GP) │
└─────────────────────────────────────────────────────────────┘
Privilege Transitions
1. System Calls: Ring 3 to Ring 0
User programs cannot directly call kernel functions. Instead, they use controlled entry points called system calls.
System Call Process:
┌─────────────────────────────────────────────────────────────┐
│ User Program (Ring 3): │
│ INT 21h ; Software interrupt for DOS services │
│ │
│ Hardware automatically: │
│ 1. Save current state (CS:IP, FLAGS, SS:SP) │
│ 2. Look up interrupt handler in IDT │
│ 3. Check privilege level of handler │
│ 4. Switch to Ring 0 stack (from TSS) │
│ 5. Load Ring 0 code segment │
│ 6. Jump to interrupt handler │
│ │
│ Kernel Handler (Ring 0): │
│ ; Process the system call │
│ ; Perform privileged operations │
│ IRET ; Return to user program │
│ │
│ Hardware automatically: │
│ 1. Restore user state (CS:IP, FLAGS, SS:SP) │
│ 2. Switch back to Ring 3 stack │
│ 3. Continue user program execution │
└─────────────────────────────────────────────────────────────┘
2. Call Gates: Controlled Ring Transitions
Call gates provide a mechanism for controlled transitions between privilege levels without using interrupts.
Call Gate Structure:
┌─────────────────────────────────────────────────────────────┐
│ • Target segment selector │
│ • Target offset within segment │
│ • Parameter count (for stack copying) │
│ • Access rights (privilege levels) │
└─────────────────────────────────────────────────────────────┘
Usage:
CALL gate_selector ; Far call through call gate
; Hardware handles privilege transition
3. Interrupt and Trap Gates
Interrupt gates and trap gates handle hardware interrupts and software exceptions while managing privilege transitions.
Interrupt Handling:
┌─────────────────────────────────────────────────────────────┐
│ Hardware Interrupt (e.g., keyboard, timer): │
│ 1. Save current privilege level │
│ 2. Switch to Ring 0 (interrupt handlers run in Ring 0) │
│ 3. Execute interrupt service routine │
│ 4. Restore previous privilege level │
│ │
│ This allows Ring 3 programs to be interrupted safely │
│ without compromising system security │
└─────────────────────────────────────────────────────────────┘
How Does CPU/MMU Enforces the Privilege Check at Hardware Level?
The CPU/MMU has no concept of “operating system” vs “application program.” It only understands:
- Current Privilege Level (CPL)
- Descriptor Privilege Levels (DPL)
- Access permissions based on these levels
So CPU doesn’t know the difference between the Operating System’s code and a User Space program’s code. How does it know who should actually have higher level of privileges and who doesn’t?
The “First Mover Advantage” Principle
1. Bootstrap Sequence:
1. CPU powers on in Real Mode (no protection)
2. BIOS/Bootloader runs (still no protection)
3. First OS code loads and runs (still no protection)
4. OS sets up GDT with itself as Ring 0
5. OS switches to Protected Mode
6. NOW protection is active - OS controls everything
**2. OS Establishes Its
// OS creates GDT during boot (while still unprotected)
GDT[0] = NULL_DESCRIPTOR;
GDT[1] = {base: 0, limit: 4GB, DPL: 0, type: CODE}; // OS code
GDT[2] = {base: 0, limit: 4GB, DPL: 0, type: DATA}; // OS data
GDT[3] = {base: 0, limit: 4GB, DPL: 3, type: CODE}; // User code
GDT[4] = {base: 0, limit: 4GB, DPL: 3, type: DATA}; // User data
// OS loads itself into Ring 0
CS = 0x08; // Ring 0 code segment
// Now CPL = 0, and OS controls all privilege decisions
But There’s a Catch - Memory Segmentation Isn’t Full Protection
80286 Segmentation Limitations:
- Same linear address space: All segments can point to the same memory
- No memory isolation: Ring 3 code can potentially read Ring 0 memory if descriptors allow it
- Descriptor-dependent: Protection
Example Problem:
// OS sets up segments (Ring 0 privilege required)
GDT[1] = {base: 0x100000, limit: 64KB, DPL: 0}; // OS memory
GDT[3] = {base: 0x100000, limit: 64KB, DPL: 3}; // User memory
// Problem: Both point to SAME physical memory!
// User can read OS memory through their own descriptor
How 80286 Changed the CPU-OS Relationship Forever
8086 Era: OS as Optional Helper
In the 8086 real mode world, the relationship between CPU and operating system was surprisingly casual:
- No memory protection - any program could access any memory location
- No privilege levels - all code ran with identical hardware access
- Direct hardware control - programs could manipulate I/O ports, interrupts, and system resources directly
- OS was essentially a library - DOS functioned as a collection of utility functions that programs could call, but could easily bypass
You could write a program that completely ignored DOS, accessed hardware directly, modified interrupt vectors, or even overwrote parts of DOS in memory. Running a program “with” or “without” an operating system made little architectural difference - the CPU imposed no restrictions.
80286: The Partnership Revolution
The 80286 introduced a radical concept: hardware features that required OS cooperation. Neither the CPU nor the OS could provide modern computing features alone - they had to work as partners.
Hardware Features Demanding OS Management:
- GDT/LDT setup - CPU provides descriptor table mechanism, but OS must create and manage the actual tables
- TSS management - CPU can switch tasks via hardware, but OS must set up Task State Segments for each process
- Privilege level enforcement - CPU enforces ring-based protection, but OS must define what gets what privileges
- Segment descriptors - CPU checks access rights, but OS must create proper access permissions and memory limits
- Protected mode switching - Complex initialization sequence requiring intimate OS-hardware coordination
The New Partnership Model:
Hardware provides MECHANISMS
↓
OS provides POLICIES
↓
CPU enforces what OS defines
Why This Partnership Was Essential:
- 1. Memory Protection: CPU can only protect memory if OS properly sets up segment descriptors
- 2. Multitasking: TSS structure is meaningless without OS task scheduling to utilize it
- 3. Privilege Separation: Ring levels only work if OS correctly manages user/kernel boundaries
- 4. Resource Management: I/O permission bitmaps need OS policy to define task capabilities
An address bus is a collection of wires (or electrical pathways) that carries memory addresses from the processor to memory and other components. Think of it as the “postal system” of the computer - when the CPU wants to read from or write to a specific location in memory, it sends that location’s address through the address bus. Each wire in the address bus represents one bit of the address. The CPU sets each wire to either high voltage (representing binary 1) or low voltage (representing binary 0) to form the complete binary address. ↩︎
(Serial Ports) Communication ports for devices like modems, mice, or serial printers. Each COM port has a base I/O address (COM1 typically at 3F8h, COM2 at 2F8h, etc.). The BIOS Data Area stores these addresses so software knows where to find each serial port. ↩︎
(Parallel Ports) “Line Printer” ports primarily used for parallel printers. LPT1 typically uses I/O address 378h. These were the standard way to connect printers before USB existed. The BIOS stores the base addresses of installed parallel ports. ↩︎
Whether Shift, Ctrl, Alt, Caps Lock, Num Lock, or Scroll Lock are currently pressed or toggled. This is stored as bit flags in memory location 0040:0017h. ↩︎
A circular buffer (usually 15-16 characters) that stores keystrokes when they’re typed faster than the program can process them. This prevents losing keystrokes during busy periods. ↩︎
This bitmap, usually set up by the operating system when a task is started, specifies individual ports to which the program should have access. The I/O bitmap is a bit array of port access permissions; if the program has permission to access a port, a “0” is stored at the corresponding bit index, and if the program does not have permission, a “1” is stored there. When a program issues an x86 I/O port instruction such as IN or OUT, the hardware will do an I/O privilege level (IOPL) check to see if the program has access to all I/O ports. If the Current Privilege Level (CPL) of the program is numerically greater than the I/O Privilege level (IOPL), the program does not have I/O port access to all ports. If the IOPL check fails, the CPU then consults the I/O bitmap to see if this specific port is allowed. It prevents malicious programs from accessing hardware directly by stopping user programs from interfering with system devices. ↩︎